
附录C: 配置参数解析
C.2 Setting2
C.2.1 pos2-armode
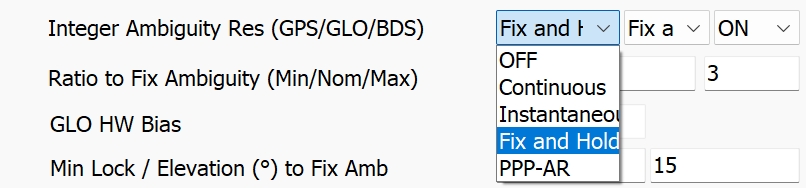
图C.2-1 模糊度固定模式
1. 参数解读
- Continuous:持续估计并求解整数模糊度 认为模糊度是连续解,通过将前面历元解算的结果约束到滤波中,从而提高后续历元模糊度固定的精度,相邻历元的无周跳模糊度给一个极小的过程噪声。 该模式的固定率不太稳定,大部分情况下固定率相对较低,可能原因是RTKLIB数据预处理和抗差不够完善,浮点解精度很差。
- Instantaneous:按历元逐个估计并求解整数模糊度 该模式中相邻历元模糊度没有相关性,即每个历元做一个最小二乘,然后直接就去尝试固定模糊度。单历元模式下本历元结果仅与当前历元有关,不需要考虑滤波发散问题,缺点是未充分利用历元间的相关性。
- Fix and Hold:将固定的模糊度约束为已解算的值 该模式与Continues模式的差异在于,仅当模糊度固定时才会将结果约束到滤波器中。不过如果模糊度存在假固定,会导致浮点解出现较大偏差,导致较长时间的无法固定。当然这个问题Continues模式同样存在,甚至更严重。
综合来看,Continuous模式不利用固定解来调整相位偏差状态,所以它对假固定最不敏感。Fix and Hold则会利用固定解的反馈来帮助跟踪与约束模糊度。
对于低成本接收机,可以使用Fix and Hold并将跟踪增益(pos2-varholdamb)调整得足够低,以最大限度地减少假固定的概率。如果armode未设置为Fix and Hold,那么后续提到的和 hold 相关的任何配置选项都不再适用。
2. 源码解析
/* rtklib.h: AR mode */
#define ARMODE_OFF 0 /* AR mode: off */
#define ARMODE_CONT 1 /* AR mode: continuous */
#define ARMODE_INST 2 /* AR mode: instantaneous */
#define ARMODE_FIXHOLD 3 /* AR mode: fix and hold */模糊度固定的模式状态有上面的几个宏来决定,我将从查看上面的宏在rtkpos.c中是如何被使用的。
a. ARMODE_CONT
ARMODE_CONT(Continues),我并没有发现它被调用,它可能出现在一些条件判断语句的else部分。
b. ARMODE_INST
ARMODE_INST的四次调用均在udbias(rtkpos.c)函数中,udbias随后被udstate函数调用,而udstate表示的是滤波器状态向量的时间更新操作,udstate包括:
- udpos:位置、速度和加速度的时间更新,及相应协方差矩阵的更新;
- udion:电离层参数更新;
- udtrop:对流层参数更新;
- udrcvbias:GLONASS接收机硬件偏移时间更新;
- udbias函数:相位偏差的更新,并最终更新单差模糊度,及相应协方差矩阵。
具体而言,udbias用以维护一个相位偏差量,这里的相位偏差是一个动态估计的单差相位偏移量,用于校正载波相位观测中的模糊度(从而完成单差模糊度的时间更新)。它通过相位与伪距的差值近似计算,并在周跳检测和状态更新中不断调整。
ARMODE_INST的4次调用如下所示:
/* udbias(rtkpos.c): temporal update of phase biases */
/* 1. 如果所配置的AR的模式为instantaneous,则重置单差相位偏移状态量 */
if (rtk->opt.modear==ARMODE_INST&&rtk->x[IB(i,k,&rtk->opt)]!=0.0) {…}
/* 2. 卫星载波相位的中断次数rtk->ssat[i-1].outc大于配置中所设置的最大次数rtk->opt.maxout,重置单差相位偏移状态量 */
if (rtk->opt.modear==ARMODE_INST&&rtk->x[IB(i,k,&rtk->opt)]!=0.0) {…}
/* 3. AR模式为instantaneous,则跳过当前卫星的因周跳而在后续进行的相位偏移重置操作,不需要基于周跳来调整连续性状态*/
if (rtk->opt.modear==ARMODE_INST||(!(slip&1)&&rejc<2)) continue;
/* 4. 只有在非instantaneous模式下,当卫星的单差相位偏移状态量被初始化时,将该卫星的锁相计数器重置为负值(-rtk->opt.minlock),表示信号锁定状态从头开始计数。这有助于确保在连续解析模式中,只有经过足够长的稳定观测后,模糊度才被认为可靠。 */
if (rtk->opt.modear!=ARMODE_INST) {…}注意:单独看ARMODE_INST的话会比较抽象,建议结合代码上下文一起看。
c. ARMODE_FIXHOLD
与ARMODE_ FIXHOLD相关的比较重要的函数是holdamb函数,holdamb重新构建了v和H,对满足条件的模糊度重新进行了一次量测更新(filter函数),并将约束添加到了P矩阵中。这次量测更新相对浮点的EKF是独立存在的,因此,因此代码中有一种说法是“伪新息”,即新构建的v。
/* holdamb(rtkpos.c): hold integer ambiguity */
/* 满足保持模糊度(hold ambiguity)的条件,如果不满足则提前退出函数 */
if (rtk->opt.modear==ARMODE_FIXHOLD&&nv<rtk->opt.minholdsats) {…}
/* relpos(rtkpos.c): relative positioning */
/* 相对定位核心函数,触发保持模糊度的机制 */
if (rtk->opt.modear==ARMODE_FIXHOLD||rtk->opt.glomodear==GLO_ARMODE_FIXHOLD)
holdamb(rtk,xa);注意:单独看ARMODE_ FIXHOLD的话会比较抽象,建议结合代码上下文一起看。
C.2.2 pos2-varholdamb (适用于demo5)

图C.2-2 模糊度Hold反馈方差
1. 参数解读
通过该参数来调整fix-and-hold模式下的跟踪增益。实际上,它是一个方差(对应EKF中R阵的对角线数值),而不是增益,因此较大的值会导致增益较低。
默认值为0.1,任何超过100的值基本都会让fix-and-hold模式失效。这个值被作用在hold过程中生成的伪测量的方差(浮点解算之后进行的一次新的量测更新),这些伪测量为卡尔曼滤波器中的偏差状态提供反馈,促使其向整数值靠拢。将这个值设置在0.1到1.0之间,既能提供足够的增益来辅助跟踪,又能避免在大多数情况下跟踪到错误的固定解。
2. 源码解析
/* holdamb(rtkpos.c): hold integer ambiguity */
for (i=0;i<nv;i++) R[i+i*nv]=rtk->opt.varholdamb;参数 varholdamb 对应于EKF中测量噪声协方差矩阵 R 的对角线数值。需要注意的是,该R矩阵用于在浮点解测量更新完成后执行的一次新的测量更新。因此,该R矩阵仅适用于这一新的测量更新过程,与浮点解过程是独立的。新测量更新完成后,状态协方差矩阵P得到更新,从而对hold的模糊度状态施加约束。这些更新后的状态随后作为下一轮迭代的先验信息。
C.2.3 pos2-gloarmode (fix-and-hold, atuocal适用于demo5)
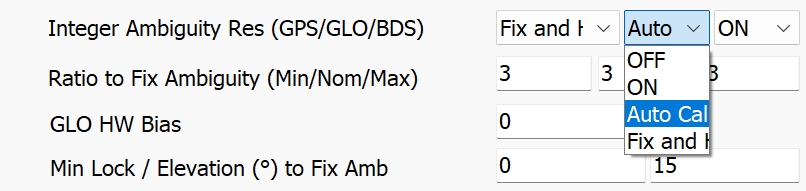
图C.2-3 GLONASS模糊度固定模式
1. 参数解读
该参数与GLONASS卫星的整数模糊度解算相关。设置方法:
- ON。如果你的接收机类型相同,或者两者的GLONASS硬件偏差均为零,你可以将此参数设置为“on”。
- Fix and Hold。如果你的接收机偏差不同,则需要考虑通道间偏差。最简单的处理方法是将此参数设置为“fix-and-hold”。在这种情况下,GLONASS卫星在通道间偏差校准完成之前不会用于模糊度解算,而通道间偏差的校准从第一次hold开始。
- Auto Cal。作为另一种选择,你可以将此参数设置为“autocal”,然后通过“pos2-arthres2”参数指定基准站和移动站之间的差分硬件偏移。这将允许GLONASS卫星立即用于模糊度解算,因此通常比“fix-and-hold”设置表现更好。此外,“autocal”功能还可以通过迭代方法,使用零基线或短基线来确定通道间偏差。
2. 源码解析
这一部分暂时不在笔者的兴趣范围内,延伸阅读参考附录A.8:GLONASS模糊度固定的算法优化。
C.2.4 pos2-gainholdamb (适用于demo5)

图C.2-4 GLONASS卫星通道间偏差校准增益
1. 参数解读
在demo5代码中,可以通过这个参数来调整GLONASS卫星通道间偏差校准的增益。
2. 源码解析
该部分可以参考C.2.2节。
C.2.5 pos2-arthres

图C.2-5 Ratio-Test阈值
1. 参数解读
用于判断模糊度固定解是否有足够的置信度(比率阈值),从而确定固定解。它是次优解的残差平方与最优解的残差平方的比值(ratio-test),通常将比值保持在默认值3.0,并同时调整其他参数。
尽管较大的ratio阈值表示比较低的阈值具有更高的置信度,但两者之间并没有确定的关系。卡尔曼滤波器状态中的误差越大,对于给定的AR比值,对该解的置信度就越低。一般来说,卡尔曼滤波器的误差在首次收敛时最大,因此此时最有可能出现错误的固定解。降低pos2-arthres1参数可以帮助避免这种情况。
2. 源码解析
/* resamb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA */
/* 1. 根据查找表计算ratio,该部分参考3.6节 */
coeff[i] = coeff[i]*opt->thresar[0]+ar_poly_coeffs[i][j];
…
/* 2. 当minAR==maxAR的时候,直接使用固定ratio(thresar[0]) */
rtk->sol.thres=(float)opt->thresar[0];
/* manage_amb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA using partial fix techniques and multiple attempts */
/* 3. 如果不满足固定规则,则省略模糊度固定过程*/
if (rtk->opt.mode<=PMODE_DGPS||rtk->opt.modear==ARMODE_OFF||
rtk->opt.thresar[0]<1.0||posvar>rtk->opt.thresar[1]) {…}
…
/* 4. 如果结果比前一历元差很多或低于ratio阈值,则移除新的卫星。 */
if (nb>=0 && rtk->sol.prev_ratio2>=rtk->sol.thres && ((rtk->sol.ratio<rtk->sol.thres) || (rtk->sol.ratio<rtk->opt.thresar[0]*1.1 && rtk->sol.ratio<rtk->sol.prev_ratio1/2.0))) {…}pos2-arthres参数主要由rtk->opt.thresar[0]控制,demo5-b34k版本中模糊度固定的ratio阈值由卫星数目动态决定。
C.2.6 pos2-arthresmin/max (适用于demo5)

图C.2-6 可变Ratio-Test阈值
1. 参数解读
如果这些值被设置为等于pos2-arthres,那么模糊度解算阈值将被固定。否则,阈值将根据用于模糊度解算的卫星数量进行调整。对于8对卫星的情况,将使用标准值,随着卫星数量的增加,阈值会降低,而随着卫星数量的减少,阈值会增加。调整后的值将被最小和最大阈值限制所限制。调整率基于FFRT方法所使用的值,demo5的实现过程仅根据卫星数量进行调整,而不考虑模型强度。
2. 源码解析
自适应ratio方法的核心是通过多项式拟合,根据卫星对数量(最多 50 对)动态调整 AR 比率。这里的理论来自于论文[8],其中部分摘录的内容参考附录B.3:自适应Ratio。与其相关的代码主要出现在resamb_LAMBDA(rtkpos.c)中。
coeff[i] = coeff[i]*opt->thresar[0]+ar_poly_coeffs[i][j];通过遍历一个 3×5 的查找表(ar_poly_coeffs),随后基于标准 AR 阈值(opt->thresar[0])计算三个多项式系数(coeff[0]、coeff[1]、coeff[2])。
rtk->sol.thres = rtk->sol.thres*1/(nb1+1)+coeff[i];使用二次多项式拟合,根据卫星对数量 nb1 调整 AR 比率。每次迭代将当前值乘以 1/(nb1+1) 并加上下一个系数,生成最终的调整后比率 rtk->sol.thres。
C.2.7 pos2-arfilter (适用于demo5)

图C.2-7 AR Filter新卫星处理功能
1. 参数解读
将此“arfilter”参数设置为“on”将允许对新卫星或从周跳中恢复的卫星进行有效性检验。如果一颗卫星在首次加入时显著恶化了模糊度比率(AR ratio),那么它在模糊度解算中的使用将被延迟。启用此功能可以让你减少对“arlockcnt”参数的使用,该参数虽然也有类似的作用,但它是通过固定的延迟计数来实现的,不是很灵活。
2. 源码解析
/* manage_amb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA using partial fix techniques and multiple attempts */
/* 如果不满足固定规则,则省略模糊度固定过程*/
if (rtk->opt.arfilter) {…}arfilter通过检测 AR 比率下降(当前解质量低于前一历元或阈值),识别并剔除可能引入噪声的新卫星,改善模糊度解析的可靠性。其具体的过程如下所示:
- 检查 AR 滤波器是否启用。
- 比较当前和前一历元的 AR 比率,若质量显著下降,进入剔除逻辑。
- 遍历卫星,剔除锁定计数为 0 的新卫星,并设置延迟。
- 若有卫星被剔除,则重新运行 LAMBDA 解析。
该逻辑主要依赖于 AR 比率的动态变化,旨在避免因新卫星引入的错误固定(false fix),并通过分阶段延迟减少对新卫星的过度剔除。此机制在滤波器收敛初期尤为重要,因为新卫星可能因信号不稳定导致解质量下降。
C.2.8 pos2-arthres1 (适用于demo5)

图C.2-8 模糊度求解延迟位置方差阈值
1. 参数解读
整数模糊度解算将延迟到位置状态的方差达到此阈值时才开始进行。其目的是避免在滤波器中的偏差状态尚未收敛之前出现的假固定。如果你将“eratio1”设置为大于100的值,并且使用单星座或单频解,那么将此参数设置为相对较低的值尤为重要。如果你在解算结果中看到模糊度比率(AR ratio)为零的情况持续过长,那么你可能需要增加这个阈值,因为这意味着由于未达到阈值,模糊度解算被禁用了。demo5作者发现0.004到0.10的值通常对一些低成本接收机很有效,但如果你的测量数据质量较低,你可能需要增加这个值,以避免首次固定解的延迟过长,或者在多次发生周跳后丢失固定解。
2. 源码解析
/* udpos(rtkpos.c): temporal update of position/velocity/acceleration */
/* include accel terms if filter is converged */
if (var<rtk->opt.thresar[1]) {
for (i=0;i<3;i++) {
F[i+(i+6)*nx]=(tt>=0?1:-1)*SQR(tt)/2.0;
}
}这表明当滤波器收敛时,位置状态的更新会考虑加速度的贡献,提高动态建模的精度。如果 var 超过 thresar[1],状态转移矩阵 F 仅包含位置与速度的线性关系(F[i + (i + 3) * nx] = tt),忽略加速度效应。在方差较大的情况下,不加入加速度项并重置状态的设计可能是为了防止发散。
/* manage_amb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA using partial fix techniques and multiple attempts */
/* skip AR if don't meet criteria */
if (rtk->opt.mode<=PMODE_DGPS||rtk->opt.modear==ARMODE_OFF||
rtk->opt.thresar[0]<1.0||posvar>rtk->opt.thresar[1]) {
trace(3,"Skip AR\n");
rtk->sol.ratio=0.0;
rtk->sol.prev_ratio1=rtk->sol.prev_ratio2=0.0;
rtk->nb_ar=0;
return 0;
}这段代码的作用是作为 AR 过程的前置条件,根据当前的定位模式、AR 配置和位置估计质量(方差)决定是否执行 LAMBDA 模糊度解析。如果不满足条件,则不进行AR操作并重置相关状态。arthres1的作用主要是希望位置方差收敛到一定程度以后再进行AR操作,这样避免了在滤波器中的偏差状态尚未收敛之前出现的假固定。
C.2.9 pos2-arthres2 (适用于demo5)

图C.2-9 GLONASS硬件偏差
1. 参数解读
按频率槽计算的相对GLONASS硬件偏差(m)。仅当pos2-gloarmode设置为“autocal”时,才会使用此参数,用于指定两个不同接收机制造商之间的通道间偏差。有关常见接收机类型的合适值,以及如何使用此参数进行迭代搜索以找到未指定接收机类型的值。
2. 源码解析
这一部分暂时不在笔者的兴趣范围内,详情请参阅资料[13]。
C.2.10 pos2-arthres3 (适用于demo5)
1. 参数解读
GLONASS硬件偏差状态的初始方差。仅当pos2-gloarmode设置为“autocal”时,才会使用此参数。较小的值会使pos2-arthres2中指定的初始值获得更大的权重。当pos2-arthres2设置为已知偏差时,demo5作者使用1e-9;而在进行迭代搜索时,demo5作者使用1e-7。
2. 源码解析
这一部分暂时不在笔者的兴趣范围内,详情请参阅资料[13]。
C.2.11 pos2-arthres4 (适用于demo5)
1. 参数解读
GLONASS硬件偏差状态的卡尔曼滤波器过程噪声。较小的值会使pos2-arthres2中指定的初始值获得更大的权重。当pos2-arthres2设置为已知偏差时,demo5作者使用0.00001;而在进行迭代搜索时,demo5作者使用0.001。
2. 源码解析
这一部分暂时不在笔者的兴趣范围内,详情请参阅资料[13]。
C.2.12 pos2-arlockcnt

图C.2-10 用于模糊度固定的最小锁定计数
1. 参数解读
在将新卫星或从周跳中恢复的卫星用于整数模糊度解算之前,需要延迟的采样数。这可以避免因包含尚未收敛的卫星而导致模糊度比值(AR ratio)被破坏。需与“arfilter”配合使用。请注意,单位是采样数,而不是时间单位,因此如果你更改了移动站测量的采样率,可能需要对其进行调整。demo5作者通常将此参数设置为零,因为u-blox接收机在标记可疑观测值方面表现非常好,但对于其他接收机,demo5作者会将其设置得更高。
2. 源码解析
/* udbias(rtkpos.c): temporal update of phase biases */
/* 1. reset phase-bias if instantaneous AR or expire obs outage counter */
if (rtk->opt.modear!=ARMODE_INST&&reset) {
rtk->ssat[i-1].lock[k]=-rtk->opt.minlock;
}
/* update phase bias noise and check for cycle slips */
for (i=0;i<ns;i++) {
…
if (rtk->opt.modear == ARMODE_INST || (!(slip & 1) && rejc < 2)) continue;
/* 2. reset phase-bias state if detecting cycle slip or outlier */
rtk->x[j] = 0.0;
rtk->ssat[sat[i]-1].rejc[k] = 0;
rtk->ssat[sat[i]-1].lock[k]=-rtk->opt.minlock;
…
}
/* set initial states of phase-bias */
for (i = 0; i < ns; i++) {
if (bias[i] == 0.0 || rtk->x[IB(sat[i],k,&rtk->opt)] != 0.0) continue;
initx(rtk, bias[i], SQR(rtk->opt.std[0]), IB(sat[i],k,&rtk->opt));
trace(3, " sat=%3d, F=%d: init phase=%.3f\n", sat[i], k+1, bias[i]);
if (rtk->opt.modear != ARMODE_INST) {
rtk->ssat[sat[i]-1].lock[k] = -rtk->opt.minlock;
}
}minlock在udbias中调用了三次,minlock 在这三处都用于延迟新卫星或不稳定卫星的加入,确保信号质量达到要求后才参与整数模糊度解析。具体作用分别是:
- 第一次:在观测中断计数溢出(reset)时,将卫星锁定计数设为负值,延迟其使用,适用于AR 模式不为instantaneous的中断恢复。
- 第二次:在检测到周跳或异常值时,重置相位偏移并延迟卫星使用,确保信号稳定后再参与解算。
- 第三处:管理新初始化的相位偏移。
/* manage_amb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA using partial fix techniques and multiple attempts */
if (rtk->ssat[sat[i]-1].lock[f] == 0) {
trace(3, "remove sat %d:%d lock=%d\n", sat[i], f, rtk->ssat[sat[i]-1].lock[f]);
rtk->ssat[sat[i]-1].lock[f] = -rtk->opt.minlock - dly; /* delay use of this sat with stagger */
dly += 2; /* stagger next try of new sats */
rerun = 1;
}minlock 在此处的角色是延迟新卫星的加入,确保其信号稳定后才用于模糊度解析。具体通过将锁定计数设为负值(-minlock - dly),配合分阶段延迟和重新运行 AR,减少了新卫星引入的不确定性。
C.2.13 pos2-minfixsats (适用于demo5)

图C.2-11 获得固定解所需的最小卫星数量
1. 参数解读
获得固定解所需的最小卫星数量。用于避免因极少数卫星而导致的假固定,尤其是在频繁发生周跳的期间。
2. 源码解析
/* resamb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA */
if ((nb=ddidx(rtk,ix,gps,glo,sbs))<(rtk->opt.minfixsats-1)) { /* nb is sat pairs */
errmsg(rtk,"not enough valid double-differences\n");
free(ix);
return -1; /* flag abort */
}minfixsats 的作用是作为模糊度固定过程的最小卫星对数阈值,确保 AR 过程有足够的数据基础。如果有效双差对数 nb 小于 minfixsats - 1,则中止 LAMBDA 固定,防止因卫星数量不足导致的错误解。
C.2.14 pos2-minholdsats (适用于demo5)

图C.2-12 整数模糊度结果进入 hold 阶段所需的最小卫星数量
1. 参数解读
整数模糊度结果进入 hold 阶段所需的最小卫星数量。用于避免因极少数卫星而导致的错误保持,尤其是在频繁发生周跳的期间。
2. 源码解析
/* holdamb(rtkpos.c): hold integer ambiguity */
/* return if less than min sats for hold (skip if fix&hold for GLONASS only) */
if (rtk->opt.modear==ARMODE_FIXHOLD&&nv<rtk->opt.minholdsats) {
trace(3,"holdamb: not enough sats to hold ambiguity\n");
free(v); free(H);
return;
}minholdsats 的作用是作为“Fix-and-Hold”模式下模糊度进入hold状态的最小卫星对数阈值,确保有足够的数据支持保持过程。如果双差对数 nv 小于 minholdsats,则中止模糊度hold,防止因卫星数量不足导致的解不稳定或错误的hold。注意这里的minholdsats没有像前面的minfixsats一样减1。
C.2.15 pos2-mindropsats (适用于demo5)

图C.2-13 每个历元排除单颗卫星所需的最小模糊度数量
1. 参数解读
启用每历元排除单颗卫星进行模糊度解算所需的最小卫星数量。在每个历元中,会排除一颗不同的卫星。如果排除某颗卫星后,模糊度比值显著改善,则该卫星将从用于模糊度解算的卫星列表中移除。
2. 源码解析
/* manage_amb_LAMBDA(rtkpos.c): resolve integer ambiguity by LAMBDA using partial fix techniques and multiple attempts */
if (rtk->sol.prev_ratio2<rtk->sol.thres&&rtk->nb_ar>=rtk->opt.mindropsats) {…}这段代码的作用是在前一历元未固定且卫星对数足够时,剔除列表中的下一个卫星(由 arsats[rtk->excsat] 确定),以排除可能影响 AR 质量的卫星。rtk->excsat 的递增和重置机制实现了逐步试错,延迟剔除卫星的重新使用,支持后续 AR 和hold过程的优化。
这样做的效果是在未来历元中,逐步剔除卫星并尝试模糊度的固定,带有一定的随机性,不过在工程上它是有效的。
C.2.16 pos2-arelmask

图C.2-14 用于模糊度固定的最小仰角
1. 参数解读
功能上与默认值0没有区别,因为小于“elmask”的高度角不会用于模糊度解算,但demo5作者将其更改以避免混淆。
C.2.17 pos2-arminfix

图C.2-15 模糊度进入hold所需的连续固定样本数量
1. 参数解读
模糊度进入hold所需的连续固定样本数量。增加此值可能是减少错误hold的最有效方法,但同时也会增加首次hold的时间和重新获得hold的时间。随着模糊度跟踪增益的降低(即pos2-varholdamb增加)和观测数量的增加,可以减少arminfix。请注意,如果移动站测量的采样率发生变化,可能需要调整此值。
2. 源码解析
a. 代码1
/* udrcvbias(rtkpos.c): temporal update of receiver h/w biases */
/* hold to fixed solution */
else if (rtk->nfix>=rtk->opt.minfix) {
initx(rtk,rtk->xa[j],rtk->Pa[j+j*rtk->na],j);
}udrcvbias 函数是 RTKLIB 中 udstate 函数的一部分,用于 时间更新(temporal update)接收机的硬件偏差(receiver hardware bias)状态,具体针对 GLONASS 系统(当 rtk->opt.navsys & SYS_GLO 且 rtk->opt.glomodear == GLO_ARMODE_AUTOCAL 时)。
该函数在 RTK 定位中管理 GLONASS 接收机的频率通道偏差(Inter-Frequency Bias, IFB),以确保相位观测的正确处理和模糊度解算的精度。
而上述的代码片段的作用是:当模糊度固定成功时,将 GLONASS 接收机 IFB 状态更新为固定解的值。
b. 代码2
/* hold integer ambiguity if meet minfix count */
if (++rtk->nfix>=rtk->opt.minfix) {
if (rtk->opt.modear==ARMODE_FIXHOLD||rtk->opt.glomodear==GLO_ARMODE_FIXHOLD)
holdamb(rtk,xa);
/* switch to kinematic after qualify for hold if in static-start mode */
if (rtk->opt.mode==PMODE_STATIC_START) {
rtk->opt.mode=PMODE_KINEMA;
trace(3,"Fix and hold complete: switch to kinematic mode\n");
}
}此处的的作用是:在连续固定模糊度的历元数达到最小阈值(minfix)后,执行固定解的保持操作(hold ambiguity)并可能切换定位模式(主要针对 STATIC-START 模式)。其中,rtk->opt.minfix 是配置文件中设定的最小固定历元数阈值,用于确保固定解的稳定性。
C.2.18 pos2-elmaskhold

图C.2-16 设置最小仰角来保持模糊度
1. 参数解读
功能上与默认值0没有区别,因为小于“elmask”的高度角不会用于保持模糊度解算结果,但demo5作者将其更改以避免混淆。
C.2.19 pos2-aroutcnt

图C.2-17 数据中断阈值(以重置模糊度)
1. 参数解读
导致模糊度重置的连续缺失样本数量。该参数与流动站的采样率有关,因此如果采样率发生变化,则需要调整此值。
2. 源码解析
/* udbias (rtkpos.c): temporal update of phase biases */
/* expire obs outage counter */
reset=++rtk->ssat[i-1].outc[k]>(uint32_t)rtk->opt.maxout;在分析 pos2-arlockcnt 参数的时候有提及到 reset 。
reset 的作用是判断是否需要重置单差相位偏移(phase-bias)状态量,通过检查卫星载波相位观测的中断次数(outc)是否超过配置文件中设定的最大中断次数阈值(maxout)。
长时间中断可能由信号丢失、周跳、接收机锁定失败等引起。
C.2.20 pos2-maxage

图C.2-18 差分龄期的最大值
1. 参数解读
该指标可以理解为来自基站差分数据的时效性,定义为流动站与基站之间的最大延迟时间(s)。延迟通常是由于差分数据传输链路异常所导致的数据丢失。demo5版本代码可以将其从默认值提高,因为在首次 fix-and-hold 后,即使这个值变得较大,仍可以获得较好的结果。
2. 源码解析
a. 代码1
/* intpres (rtkpos.c): time-interpolation of residuals (for post-processing solutions) */
if (fabs(ttb)>opt->maxtdiff*2.0||ttb==tt) return tt;intpres 主要用于后处理解算(post-processing),通过 时间插值 对基站观测的残差(y)进行调整,使其与流动站观测的时间(time)对齐。
该代码片段的作用是 判断是否进行时间插值操作,主要基于两个条件:(1) 上一组基站观测(obsb)与流动站观测(time)的时间差(ttb)过大,或 (2) 上一组与当前基站观测的时间差相同(以避免冗余计算)。opt->maxtdiff 在此起到 时间差阈值 的作用,控制时间插值的有效性。
b. 代码2
/* relpos(rtkpos.c): relative positioning */
if (opt->mode!=PMODE_MOVEB) {
/* check if exceeded max age of differential */
rtk->sol.age=dt;
if (fabs(rtk->sol.age)>opt->maxtdiff) {
errmsg(rtk,"age of differential error (age=%.1f)\n",rtk->sol.age);
free(rs); free(dts); free(var); free(y); free(e); free(azel); free(freq);
return 1;
}
}若时间差(dt)超过 maxtdiff,说明基站数据太旧,可能不可靠,触发错误,释放内存并终止相对定位(退化为单点定位)。
至于 PMODE_MOVEB 模式(即 movingbase)为什么会跳过,并不是因为 movingbase 不需要时间同步,而是由于:
movingbase 模式下,基站和流动站通常在一个载体上,RTKLIB 在设计 movingbase 模式时,假设了基站和流动站的观测数据是实时或近实时传输的,因此对时间同步会有更严格的要求,最大的时间差小于1.05s(TTOL_MOVEB),此时 pos2-maxage 的配置不起作用(准确来讲是换了一种方式作用)。
c. 代码3
/* rtkpos(rtkpos.c): precise positioning */
if (fabs(rtk->sol.age) > MIN(TTOL_MOVEB, opt->maxtdiff)) {
errmsg(rtk, "time sync error for moving-base (age=%.1f)\n", rtk->sol.age);
return 0;
}这段代码主要作用于 movingbase 模式。在代码2中已有提及,这里的作用是检查基站与流动站观测的时间差(差分龄期,rtk->sol.age)是否超过允许的最大阈值,以确保时间同步的有效性。
opt->maxtdiff 在此作为时间阈值的参考值,与 TTOL_MOVEB(1.05s)比较后取较小值。而通常 TTOL_MOVEB(1.05s)要远小于 opt->maxtdiff。
C.2.21 pos2-rejionno
1. 参数解读
pos2-rejionno 指的 EKF 新息 的拒绝阈值,这里新息指的是 验前残差,偶尔大家也会称其为 OMC(Observation Minus Computed) 以便于记忆。
如果新息大于该值(m),则拒绝该观测值。在 demo5 b33 代码之前,该值未经调整直接应用于伪距和载波相位。在较新版本中,该值仍直接应用于相位观测值,但伪距观测值会乘以 eratio。这使得可以根据相位测量设置合适的值。
demo5 作者通常将其设置为1.0,这有助于捕获并避免未标记的周跳,但有时需要将其设置得更高。设置得过低可能导致滤波器在数据质量较差时发散,因此 demo5 作者将默认值设置为 2.0,不过常用值则是 1.0。
2. 源码解析
/* ddres(rtkpos.c): double-differenced residuals and partial derivatives */
/* if residual too large, flag as outlier */
// 对载波相位/伪距双差进行检查,如果过大超过阈值,则认为无效,阈值opt→maxinno为30。
if (fabs(v[nv])>opt->maxinno[code]*threshadj) {
rtk->ssat[sat[j]-1].vsat[frq]=0;
rtk->ssat[sat[j]-1].rejc[frq]++;
errmsg(rtk,"outlier rejected (sat=%3d-%3d %s%d v=%.3f)\n",
sat[i],sat[j],code?"P":"L",frq+1,v[nv]);
continue;
}这段代码的作用是检查双差残差(v[nv])是否过大,若超过阈值(opt->maxinno[code] * threshadj),则将其标记为异常值(outlier),剔除该观测数据,避免其影响卡尔曼滤波的量测更新。opt->maxinno 作为残差阈值,起关键的异常值检测作用。