
1.4 核心代码库介绍
本章节仅作为 RTKLIB 内容的概览,不建议花费过多时间研究,详细内容请参考 RTKLIB 源码以及后续章节所对应的解析上。
代码库(src中包含的程序)是 RTKLIB 的核心,该代码库以方便调用的方式提供给用户,提供了相当全面的GNSS功能服务,也因此RTKLIB中包含了"LIB"的名称。RTKLIB提供的库函数和API(应用程序接口)如下所示:
- 基础工具: 卫星和导航系统函数、矩阵运算函数、时间与字符串函数、坐标转换、平台相关函数、选项配置
- 数学模型: 标准定位、精密定位、整周模糊度固定、星历与时钟函数、大气模型、天线模型、潮汐模型、大地水准面模型、大地基准转换、SBAS
- 数据处理: 输入和输出函数、接收机原始数据处理、解函数(定位结果处理)、KML转换器
- 协议支持: RINEX、RTCM、NMEA
- 数据传输: 数据流服务器、数据下载
- 程序调试: 调试与跟踪
rtklib.h 管理了核心代码库的代码,并对一些接口函数进行了导出。 rtklib.h 主要有四大部分:宏定义、结构体定义、全局变量、函数定义
注意只有加了 EXPORT 前缀的函数才可以被其他源文件调用。源码中包含了许多以 static 开头的函数,它们在 rtklib.h 没声明,因此无法被外部调用。想调用它们的话,只需要把前缀改成 EXPORT,然后在 rtklib.h 中加上声明,这也是比较常见的需求。
1.4.1 宏定义
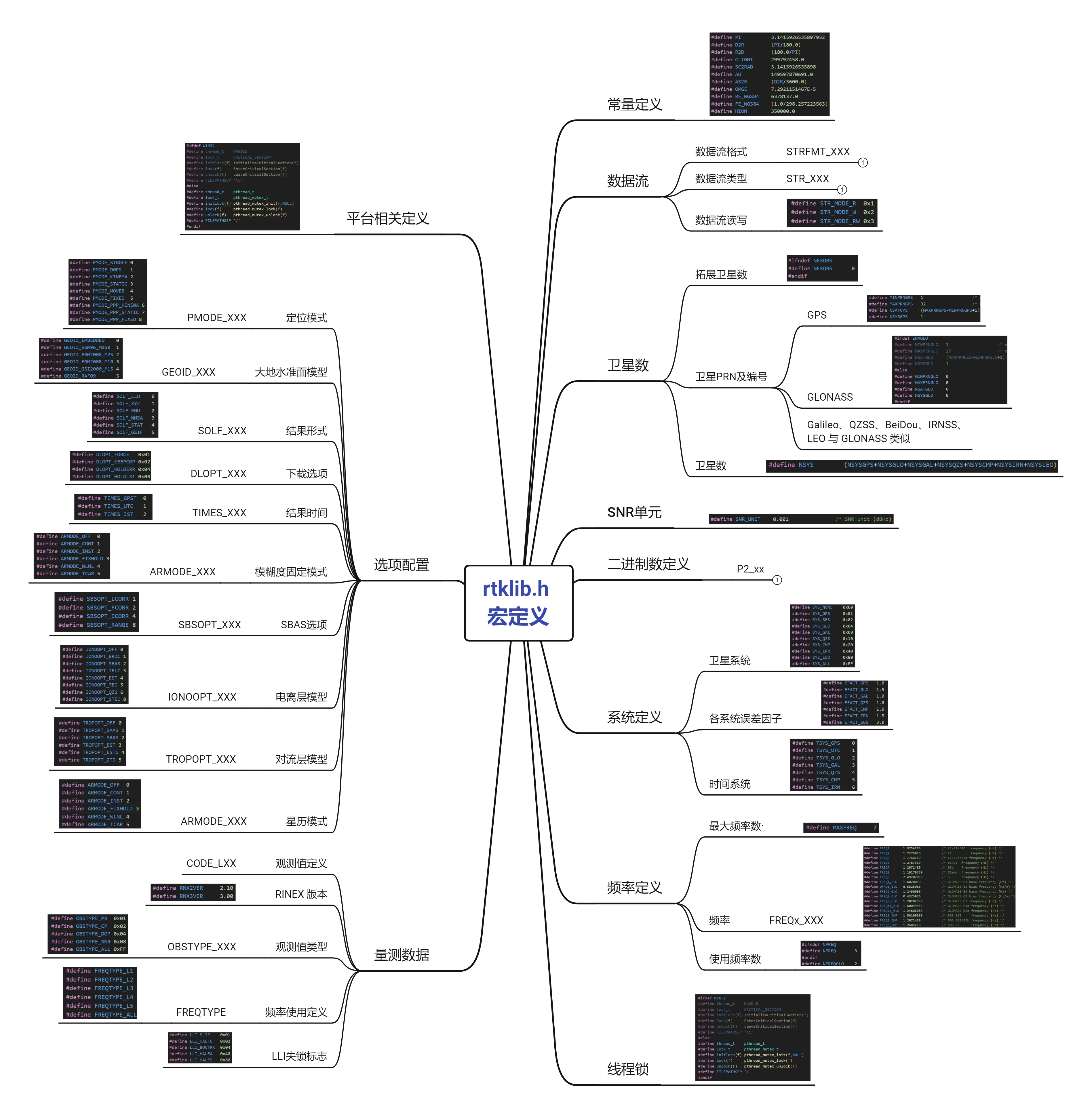
图1.4-1 rtklib.h 宏定义[1]
当前包含的各种 ifdef:
- WIN32、WIN_DLL:用 Windows 下的代码;
- TRACE:用于调试信息输出;
- ENAGLO、ENAGAL、ENAQZS、ENACMP、ENAIRN、ENALEO:启用除 GPS 外的卫星系统,
- OBS_100HZ:判定时间重合的阈值 DTTOL
- MKL:使用英特尔数学核心函数库(Intel MKL)
- LAPACK:使用线性代数包(LAPACK)/基础线性代数子程序(BLAS)
- IERS_MODEL:使用国际地球自转服务(IERS)潮汐模型
- CPUTIME_IN_GPST:以全球定位系统时间(GPST)进行CPU时间操作;
- CLOCK_MONOTONIC_RAW:Linux中用于时间测量的一个时钟源选项;
- RRCENA:启用循环冗余校验(RRC)校正;
- SVR_REUSEADDR:重用TCP服务器地址。
其中 TRACE、ENAGLO、ENAGAL、ENAQZS、ENACMP、ENAIRN、ENALEO 最为常用。
1.4.2 结构体定义

图1.4-2 rtklib.h 结构体[1]
1.4.3 全局变量
- 卡方检验表:
extern const double chisqr[]; - 默认处理选项:
extern const prcopt_t prcopt_default; - 默认结果选项:
extern const solopt_t solopt_default; - SBAS IGP 波段 0-8:
extern const sbsigpband_t igpband1[9][8]; - SBAS IGP 波段 9-10:
extern const sbsigpband_t igpband2[2][5]; - 数据流格式字符串:
extern const char *formatstrs[]; - 系统选项表:
extern opt_t sysopts[];
1.4.4 基础函数定义
1. 矩阵、向量、最小二乘、卡尔曼滤波
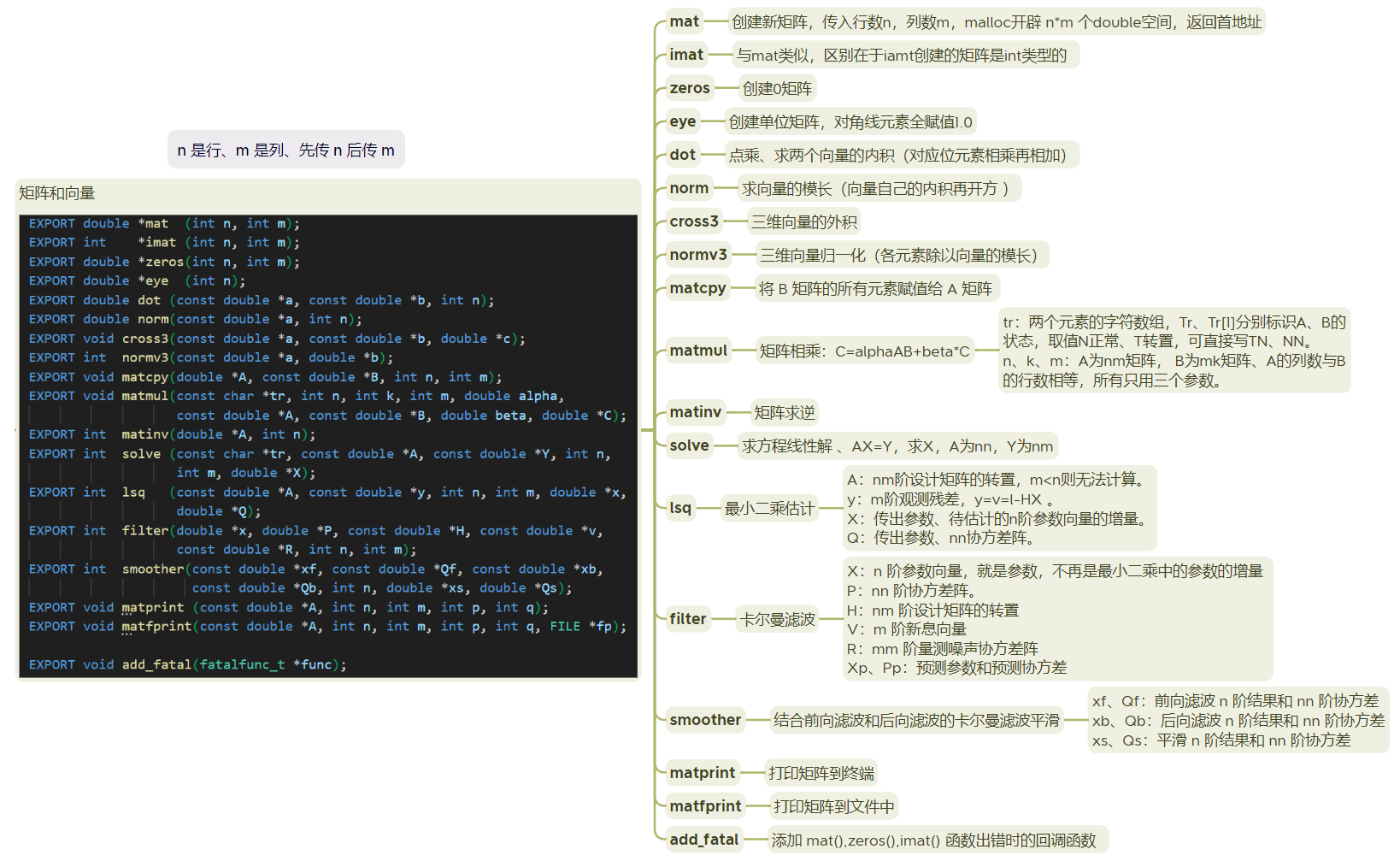
图1.4-3 rtklib.h 矩阵、向量、最小二乘、卡尔曼滤波[1]
- RTKLIB 中用 double 类型一维数组表示矩阵,不能自动识别矩阵的行列数,每次传矩阵的时候都要传入行数 n、列数 m。
- 用矩阵的时候要先 malloc 开辟空间,用完记得 free 释放空间。
- 要能熟练计算矩阵加减乘除转置求逆。
- RTKLIB 没有实现矩阵加减的函数,用的时候直接写 for 循环,比如把三维向量 dx 加到 X 上:c
for (i=0;i<3;i++) X += dx; - 矩阵求逆用的 LU 分解法,时间复杂度 ,对于大规模的矩阵,如果利用矩阵的稀疏性和对称性等特性,而且当使用不完全分解方法(例如,只计算到一定程度或使用截断技术)时,LU 分解的效率会更高。
- matprint() 很常用,调试的时候很难直接看的矩阵元素的值(都是指针),得输出到终端或者文件再看。
2. 时间和字符串
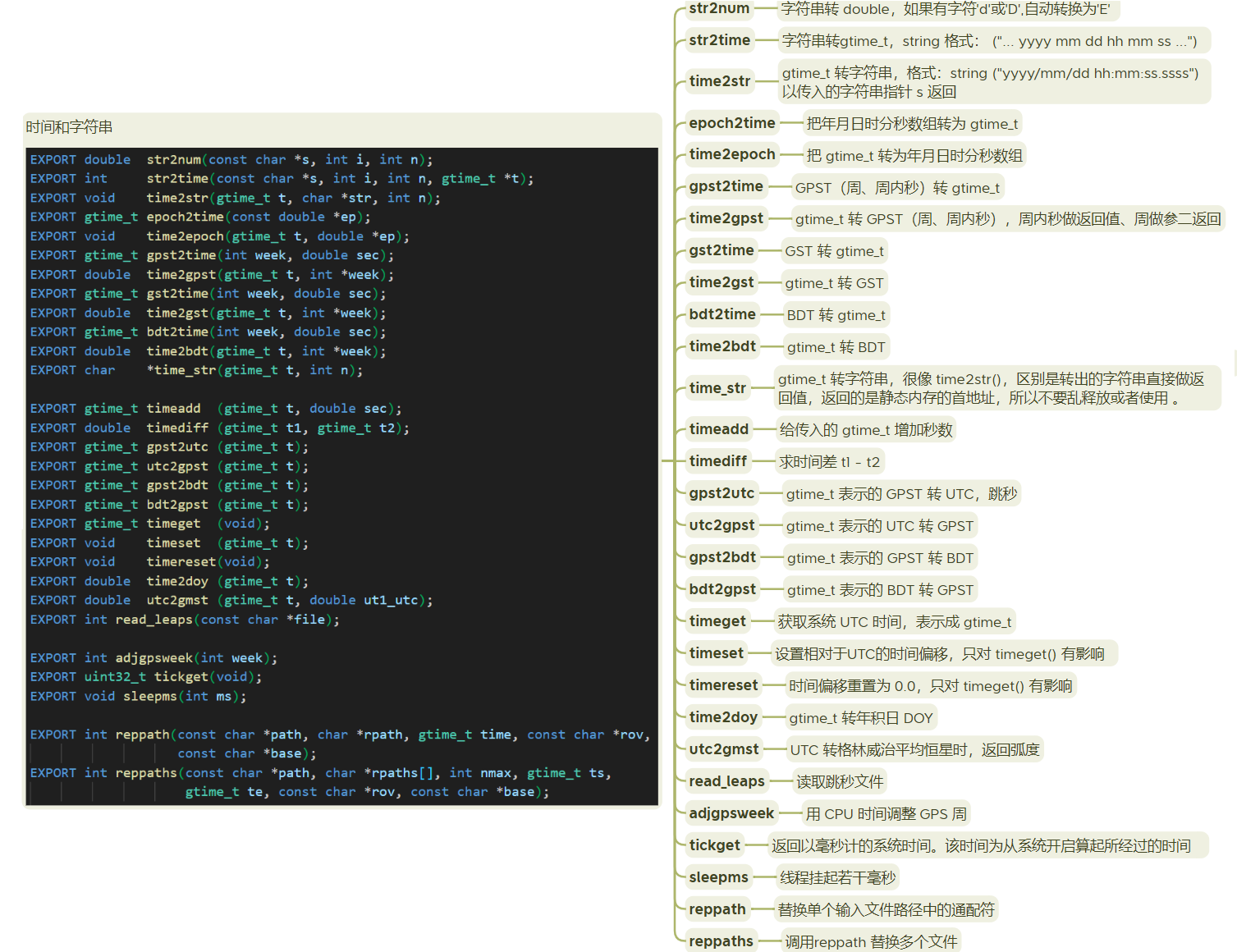
图1.4-4 rtklib.h 时间和字符串[1]
- RTKLIB 中时间一般都以
gtime_t类型存储,为了提高时间表示的精度,分开存 GPST 时间的整秒数和不足一秒的部分。 - 经常需要做年月日时分秒、周+周内秒、GPST 三种时间之间的转换;输出北京时间要在 UTC 基础上加 8 小时。
- BDT、GLONASST 不用于计算,读完文件就转为 GPS 时间了。
3. 坐标转换
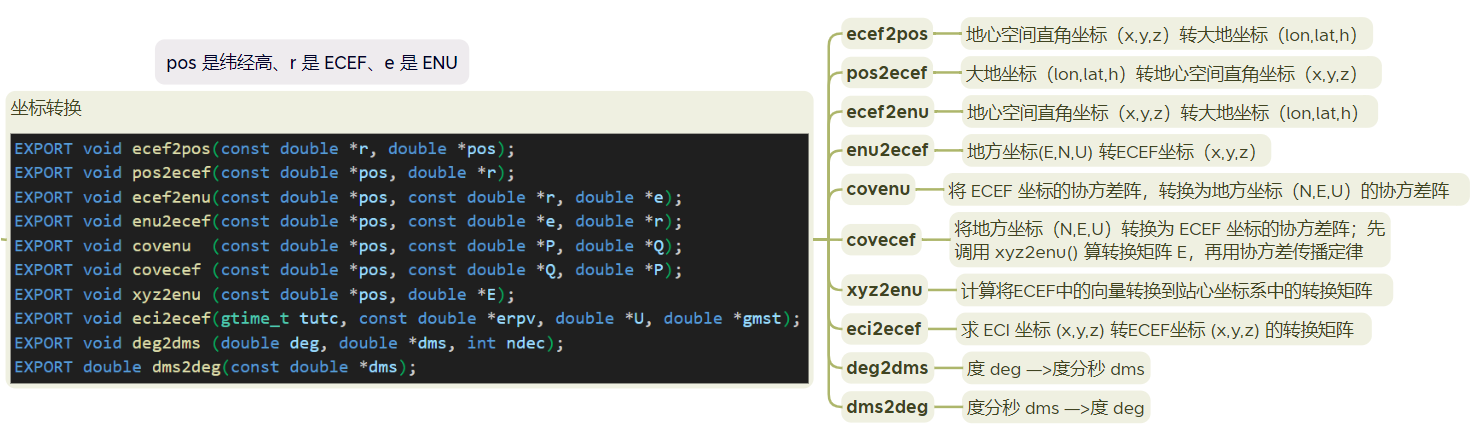
图1.4-5 rtklib.h 坐标转换[1]
- ECI 用的很少,只在
sunmoonpos()函数中计算日月坐标时候用到了,不用怎么关注。 - ENU、ECEF、LLH 三套坐标系都频繁使用,要熟练掌握他们之间的转换,包括协方差的转换
- ENU 是局部相对坐标系,以某一个 LLH 坐标为原点,坐标转换的时候要传入这个 LLH 坐标。
- ENU 常用
e表示、ECEF 常用r表示、LLH 常用pos表示。
4. 卫星系统、观测值
- 卫星系统表示:
- 表示卫星系统的字母:GRECJIS。
- 7 位二进制码表示,对应位写 1 表示有对应的系统,做与运算可加系统。
- 卫星的表示:
- 可以表示为各系统的卫星 ID(系统缩写+PRN):B02、C21。
- 也可表示为连续的卫星编号 satellite number,断点调试或者看 Trace 文件的时候,经常只能看到卫星编号。
- 观测值类型:
- C:伪距、D:多普勒、L:载波相位、S:载噪比。
CODE_XXX:观测值类型定义,用一串连续的数字表示。sigind_t:表示每种卫星系统的载波类型和观测值类型 ,每种类型的系统其实对应的就是一个sigind_t结构体。
- 观测值优先级:
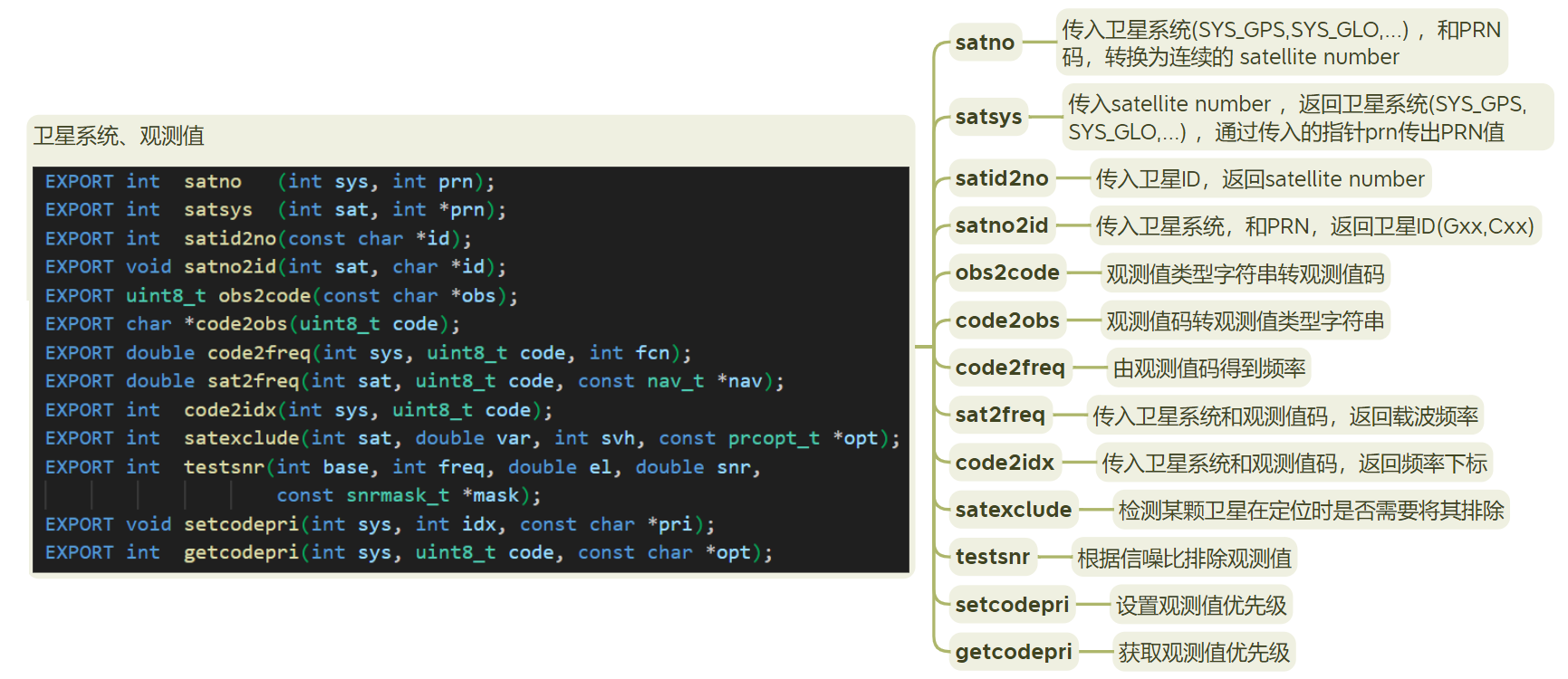
图1.4-6 rtklib.h 观测值优先级[1]
1.4.5 选项调试输出
1. 配置选项读取
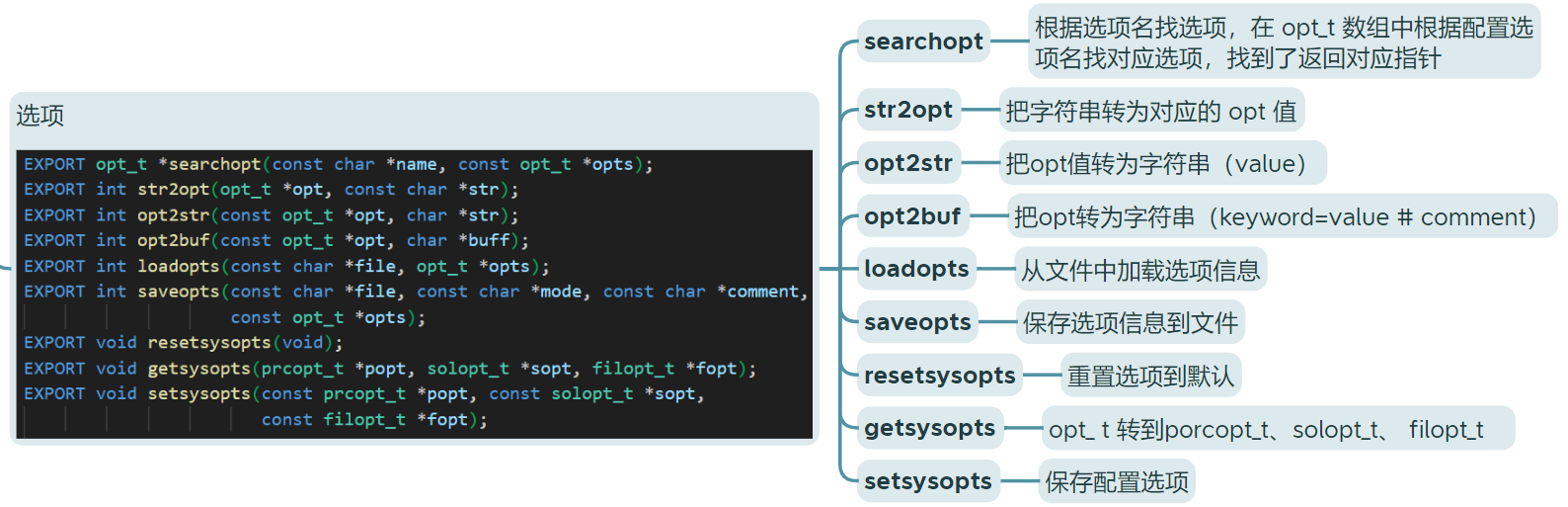
图1.4-7 配置选项读取
- 选择主要存在
prcopt_t、solopt_t、filopt_t三个结构体中。 - 后处理解算程序 rnx2rtkp 和实时解算程序 rtksvr 读取结果文件流程是一样的:
- 先调用
resetsysopts()重置所有配置为默认。 - 调用
loadopts()读取配置文件内容,存入opt_t的sysopt中。 - 最后调用
getsysopts()将opt_t转到porcopt_t/solopt_t/filopt_t。
- 先调用
2. Trace 调试
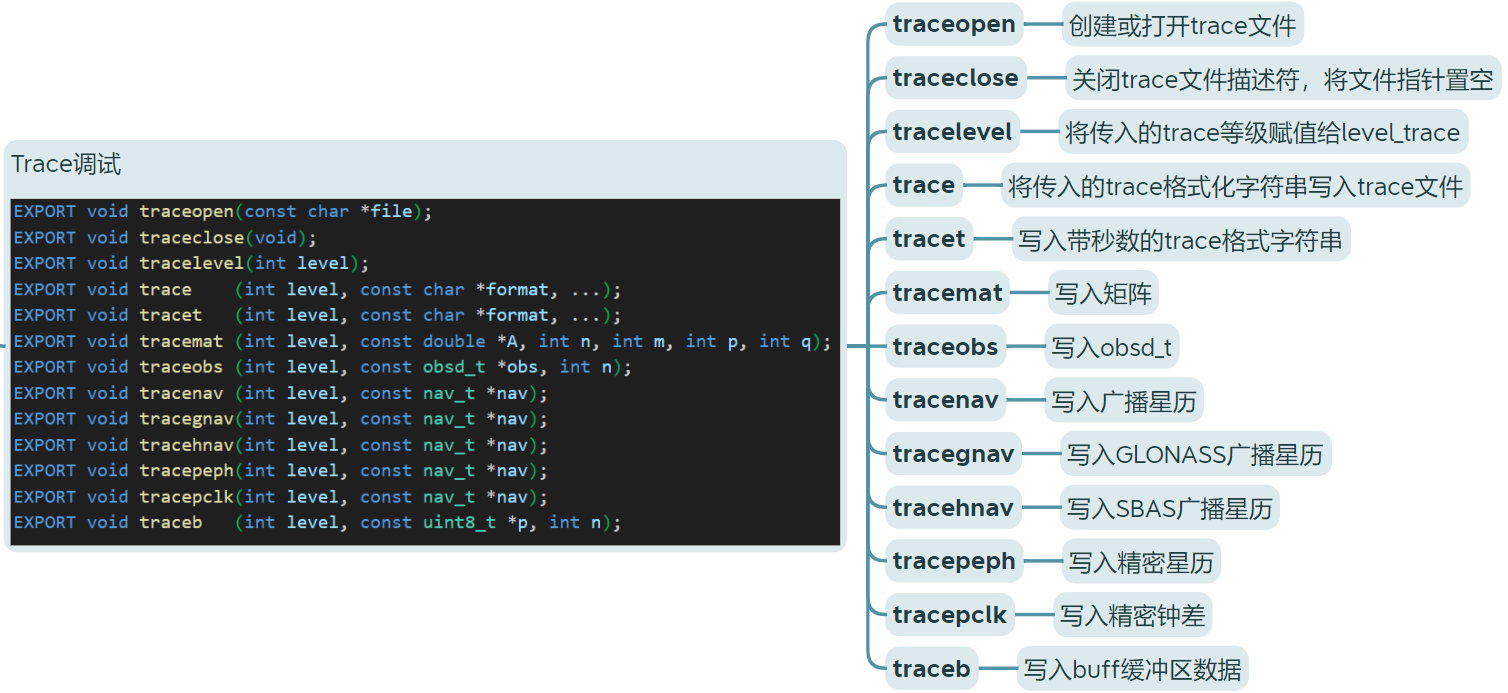
图1.4-8 Trace 调试
- 在 rtklib.h 中加入 #define TRACE,启用 trace ,不定义则将 trace 函数全赋空值。
- Trace 信息分五个等级,从 1-5 重要性逐渐降低,通过 tracelevel() 函数可以设置输出的最高等级,设置 2 级意味着只输出 1/2 级信息。
- 一级 Trace 是致命错误,出现一级错误基本上意味着程序无法继续执行,比如观测星历文件读取错误、内存分配错误。
- 二级 Trace 是警告,出现二级警告程序可能依然能继续执行,但也可能无法进行解算,比如改正文件读取失败,数据解析出错,二进制数据校验出错,某一历元解算失败,缺失解算所需的星历或改正参数等。
- 三级 Trace 是程序主要执行流程,主要在函数的开头,告诉我们执行到了这个函数。
- 四级 Trace 是比三级更深入的程序执行流程,主要在三级 Trace 函数的中间或者调用的子函数开头,告诉我们执行到了这个操作。
- 五级 Trace 是解算的中间过程,具体到每颗卫星,每个频点,每次循环。
- 看 Trace 文件可以辅助断点调试,甚至替代断点调试。程序执行出错,开 2/3 级 Trace,看 Trace 文件里的 error、warring 就能知道大致出了啥问题,定位出问题的函数,断点调试的时候你就知道该在哪设置断点了。
3. 结果输入输出、NMEA
输出包含了解算结果与过程状态数据,而根据输出的定义,除了NMEA,还有 RTKLIB 中自定义的数据格式(笔者喜欢称其为 POS 格式)。更多内容请参考 RTKLIB-Manual-CN 附录 B。
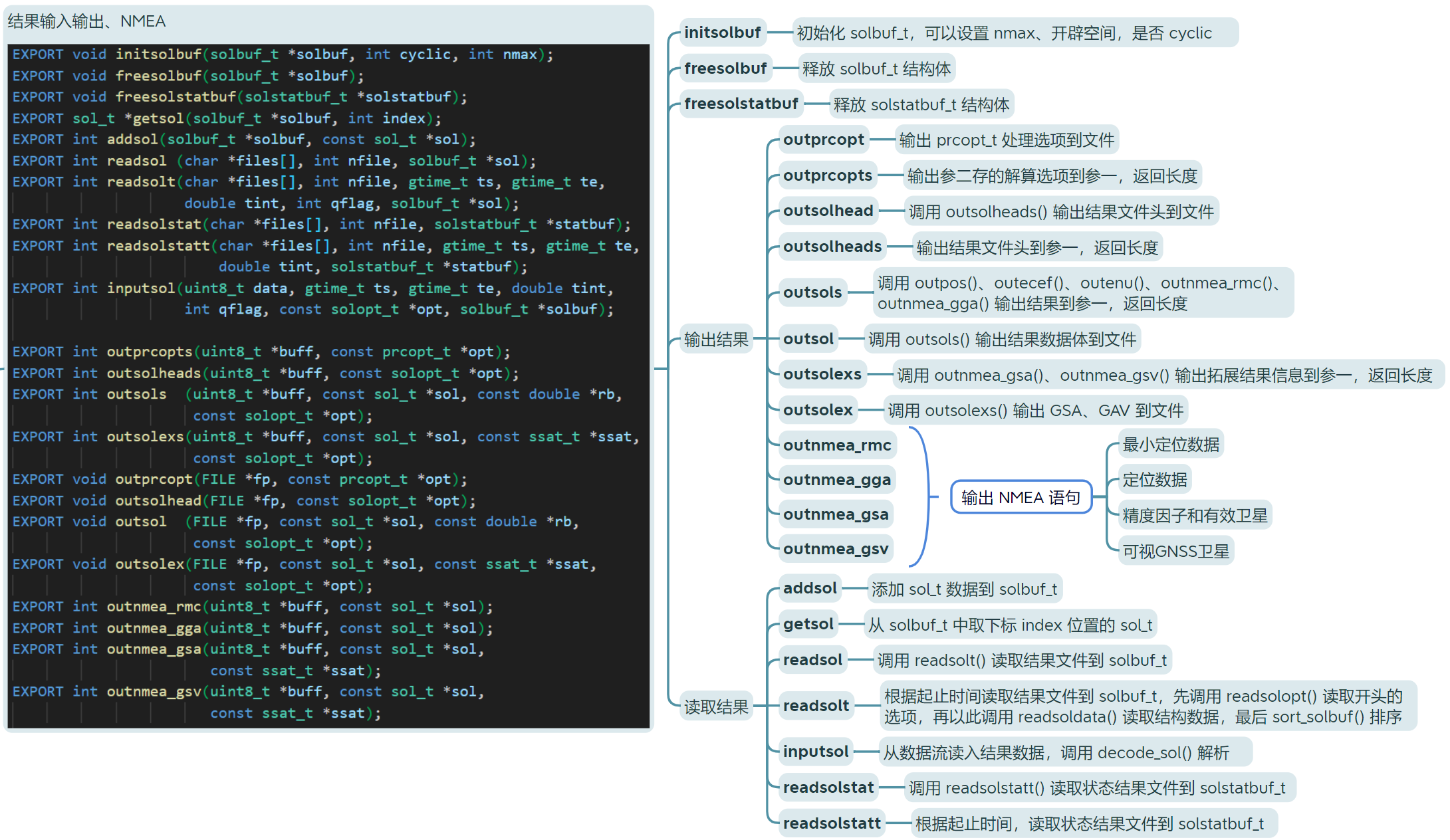
图1.4-9 结果输入输出、NMEA
1.4.6 导航数据
1. 导航数据输入
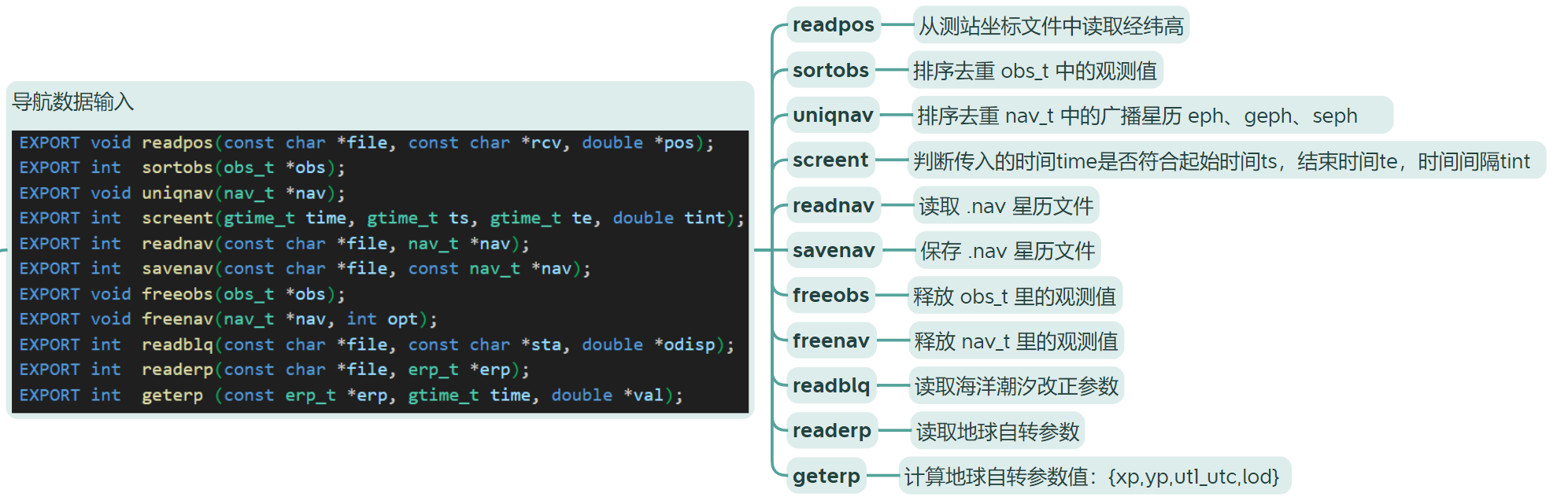
图1.4-10 导航数据输入
2. RINEX 文件读写
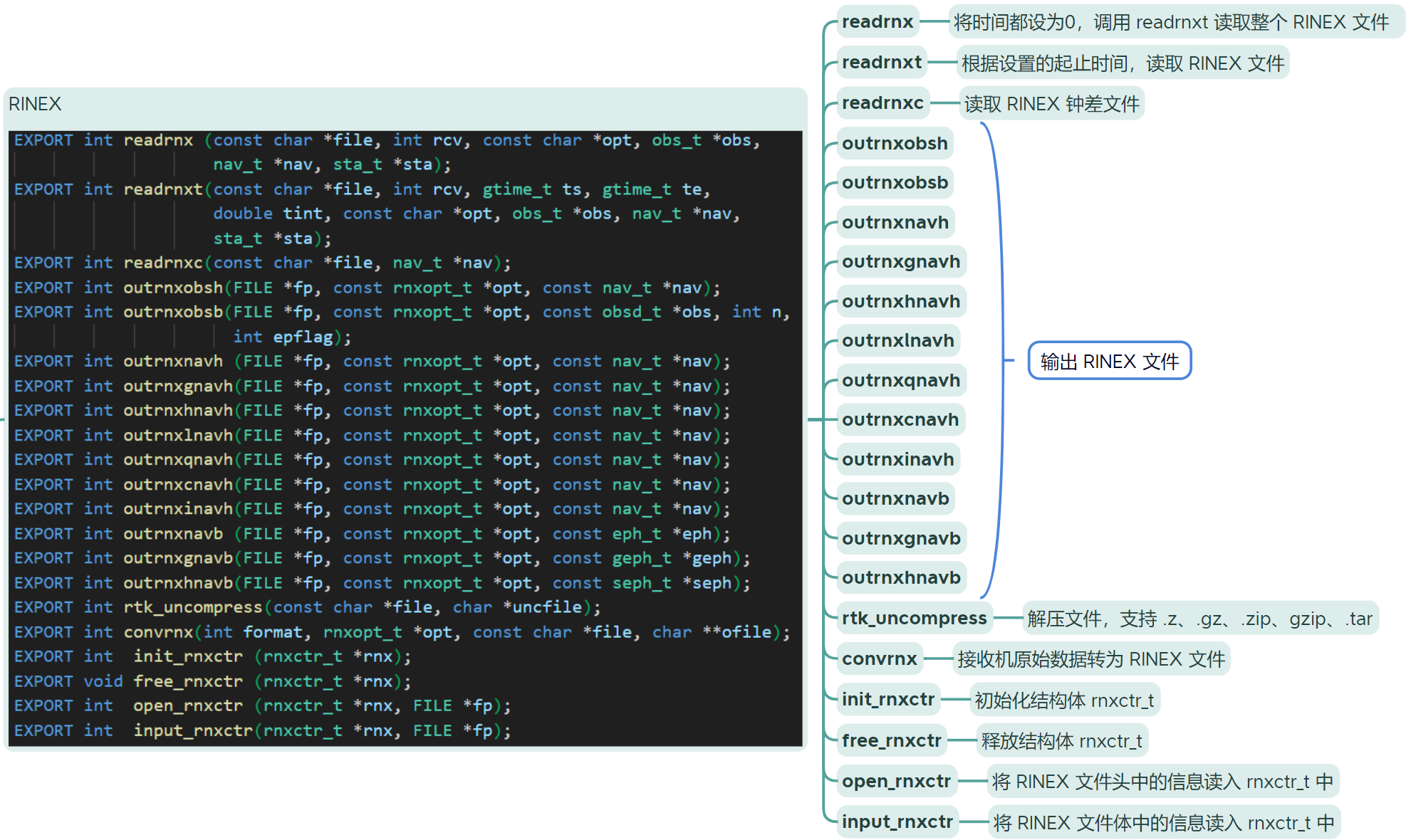
图1.4-11 RINEX 文件读写
3. 二进制数据读写
- 用于数据流解析。
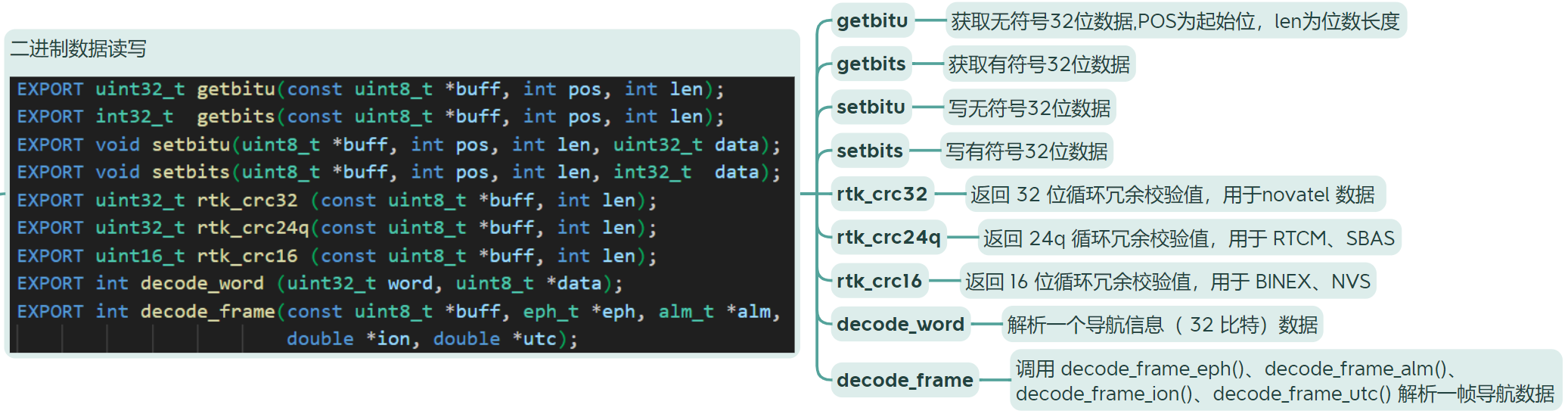
图1.4-12 二进制数据读写
4. 星历数据解析
整体上与观测数据的解析类似,只是会按照星历的数据格式填充相应的结构体。
5. RTCM 读写
想进行定位解释至少要有星历,要有观测数据,常用 NAV 配 MSM4(伪距载波信噪比)、MSM7(伪距载波多普勒信噪比)
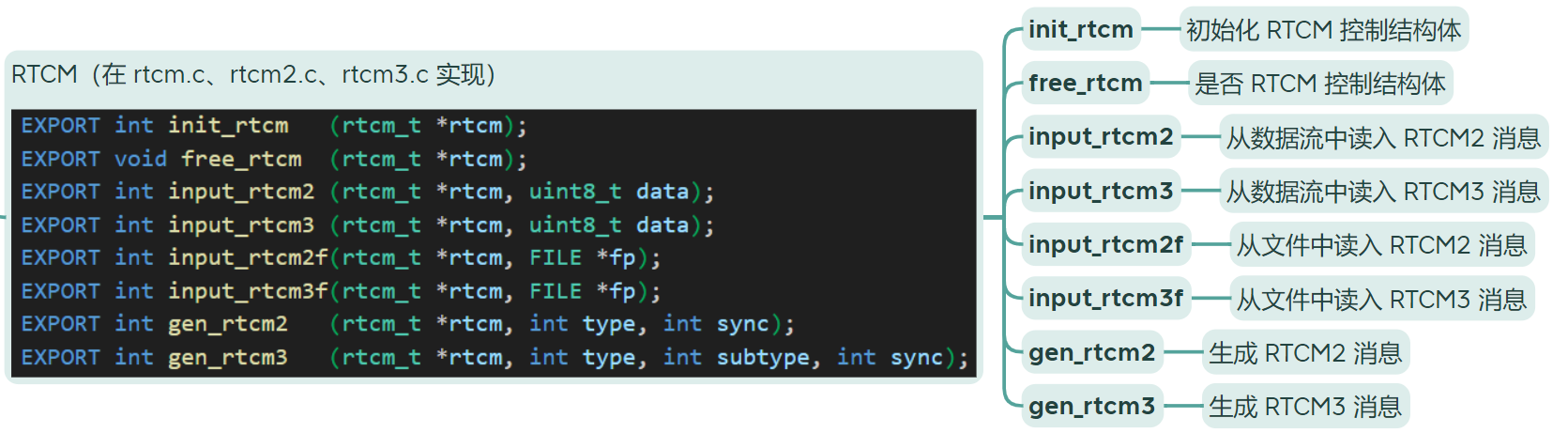
图1.4-13 RTCM 读写[1]
6. 接收机自定义格式读写
这里暂未涉及。
1.4.7 解算相关
1. 定位解算入口
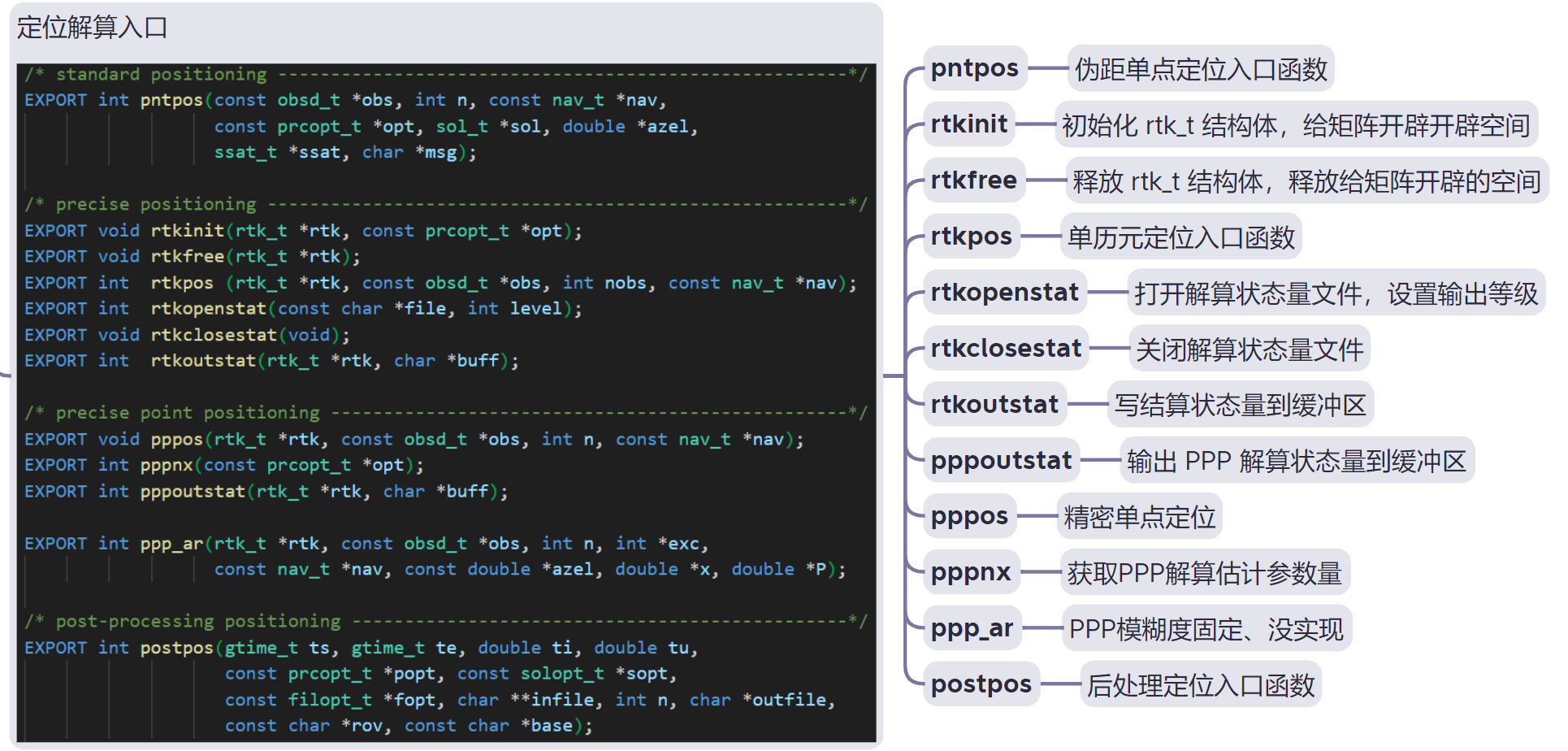
图1.4-14 定位解算入口[1]
2. 实时解算
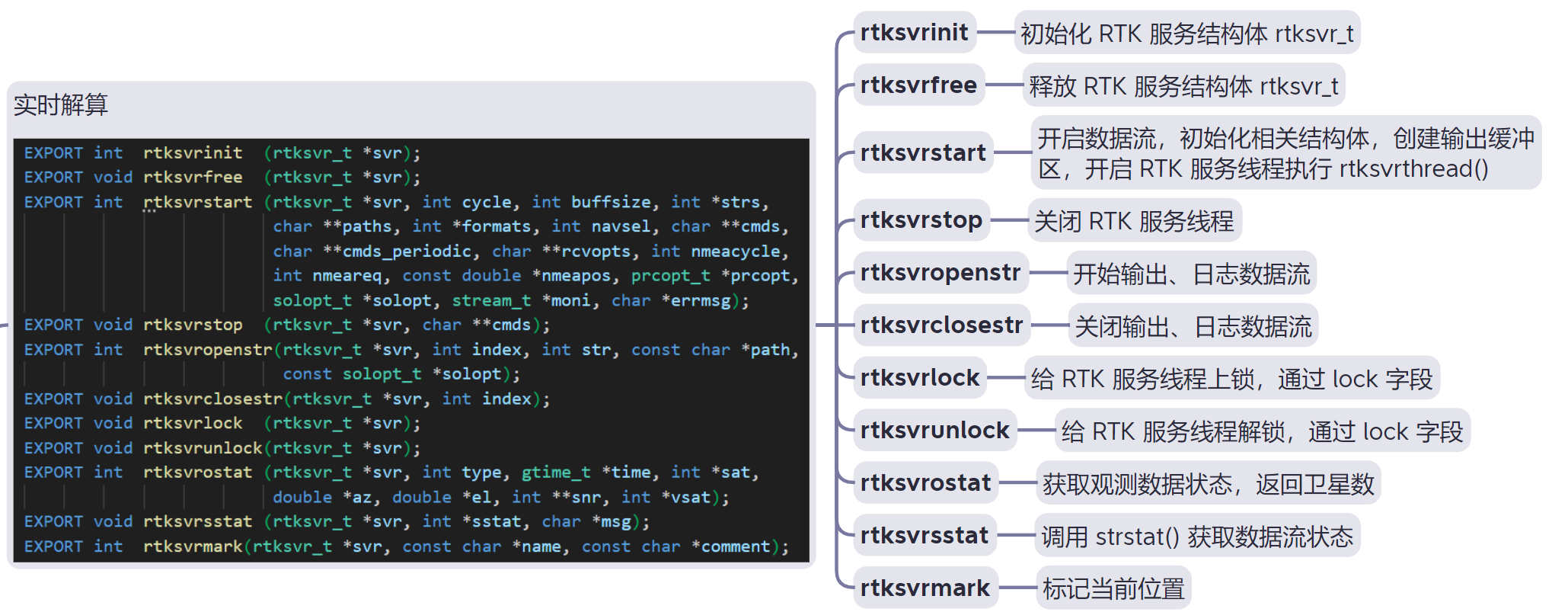
图1.4-15 实时解算[1]
1.4.8 数据流相关
1. 数据流
- 数据流函数用的大部分在 Window 和 Linux 各有一套,涉及到很多系统库,好在现在 AI 发达,可以用来辅助理解。
- 每种数据流关注四个函数:打开、关闭、写数据、读数据。
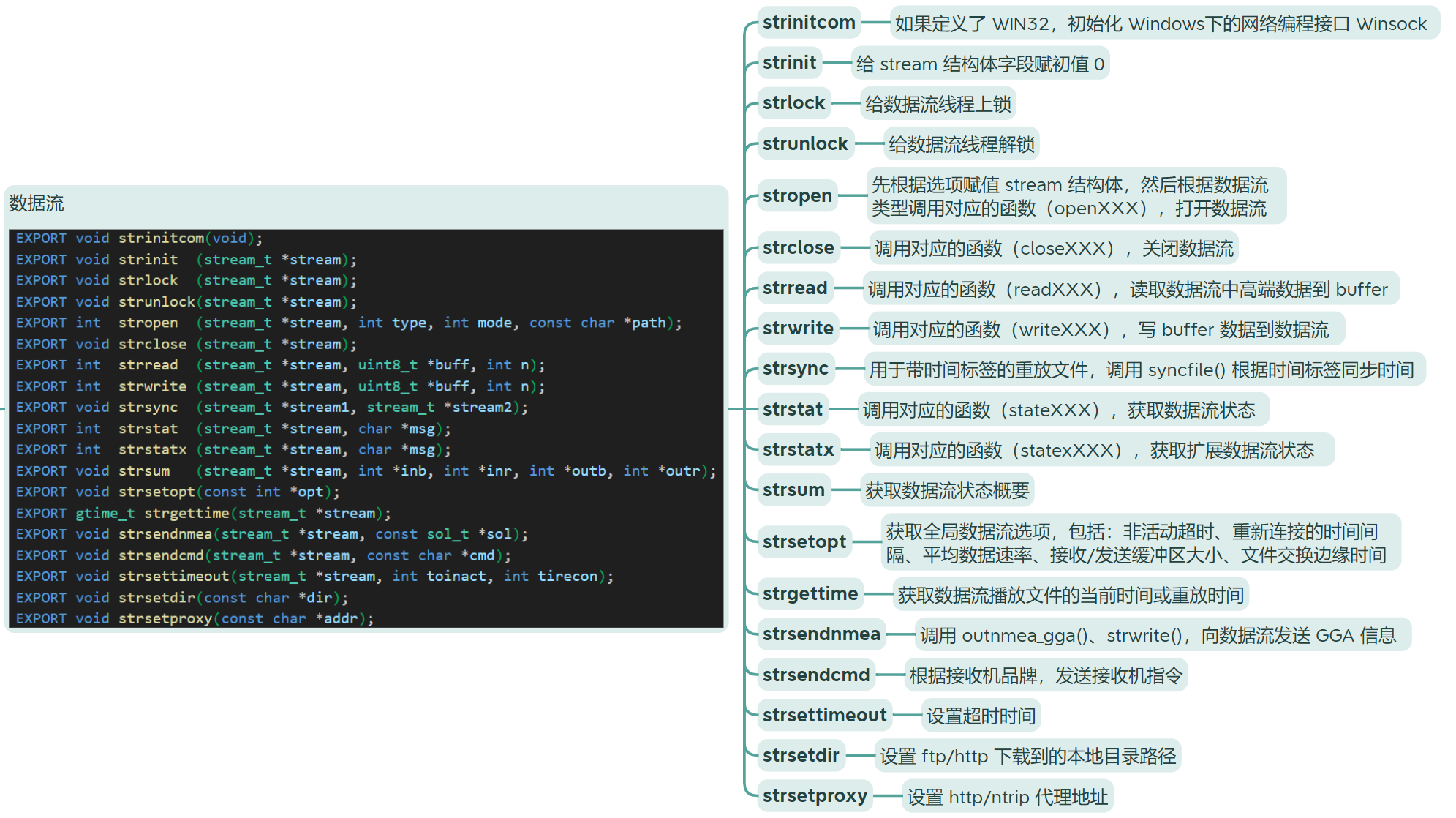
图1.4-16 数据流[1]
2. 数据流线程管理
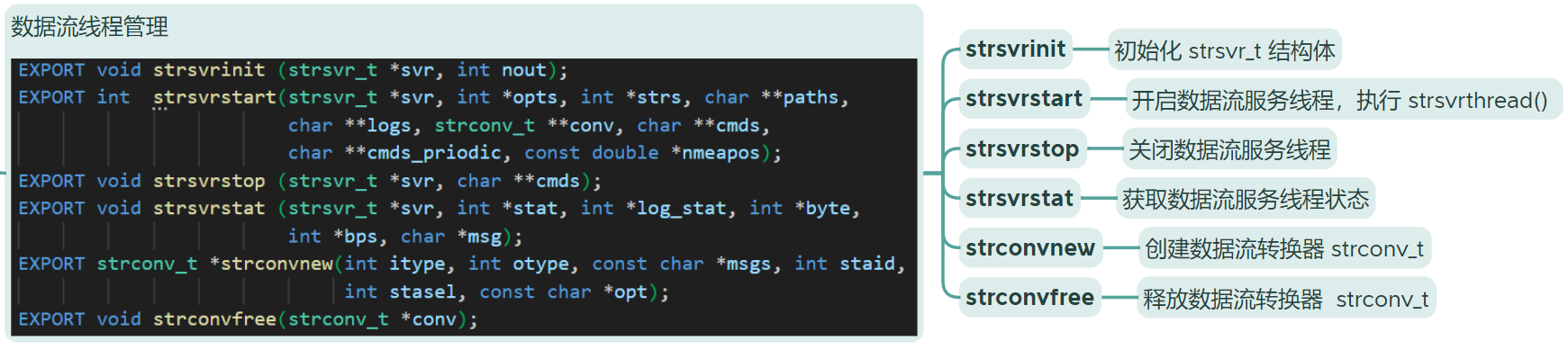
图1.4-17 数据流线程管理[1]
1.4.9 模型改正
1. 星历、钟差、DCB、FCB
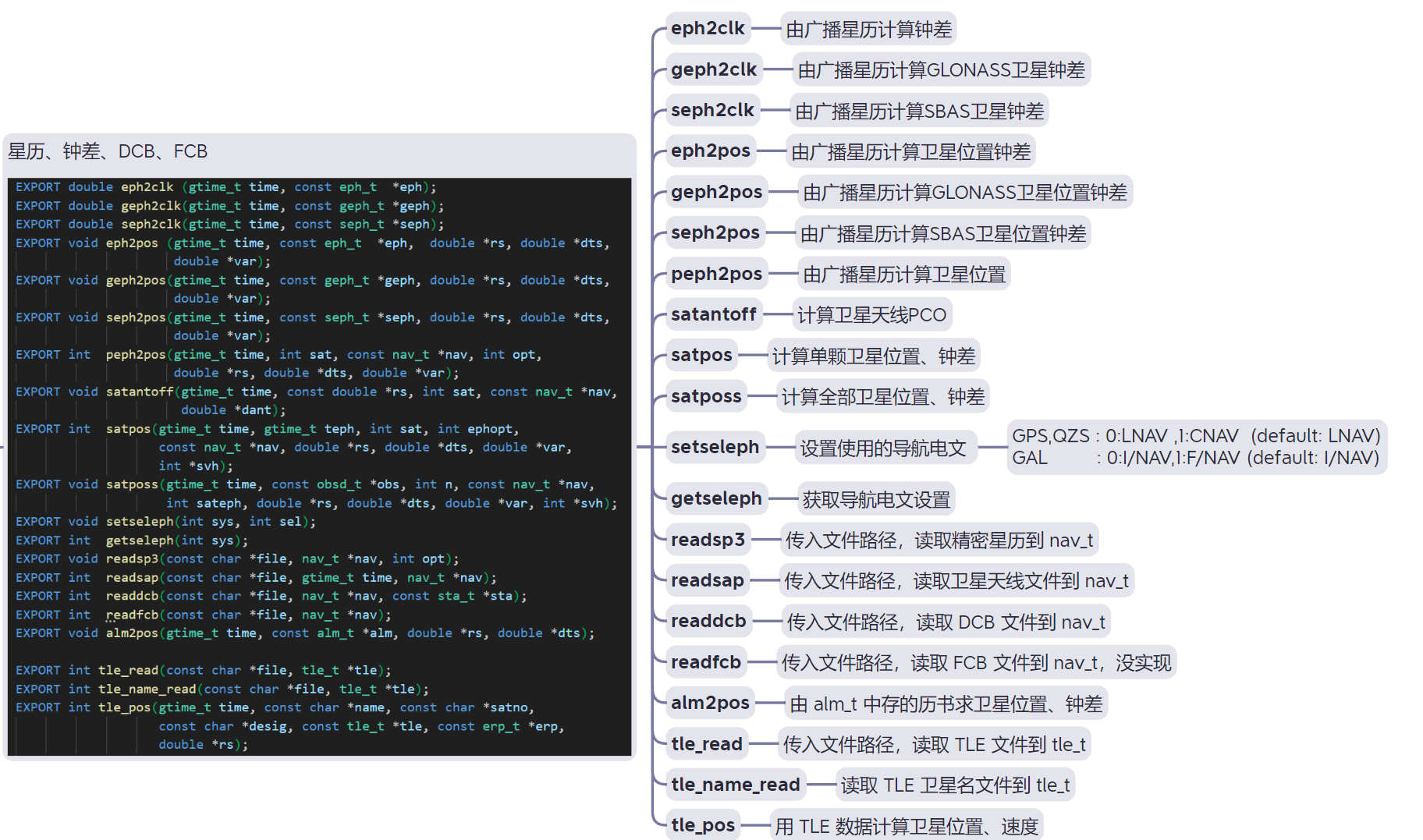
图1.4-18 星历、钟差、DCB、FCB[1]
2. SBAS
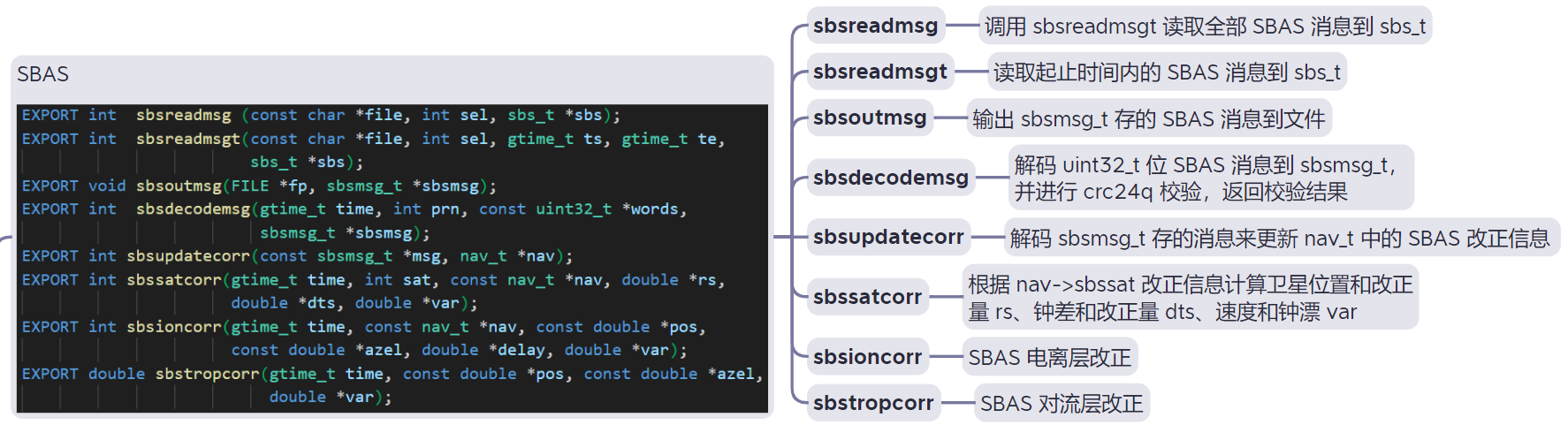
图1.4-19 SBAS[1]
3. 定位模型:计算高度角、方位角、卫地距、DOP 值

图1.4-20 定位模型:计算高度角、方位角、卫地距、DOP 值[1]
4. 对流层、电离层模型
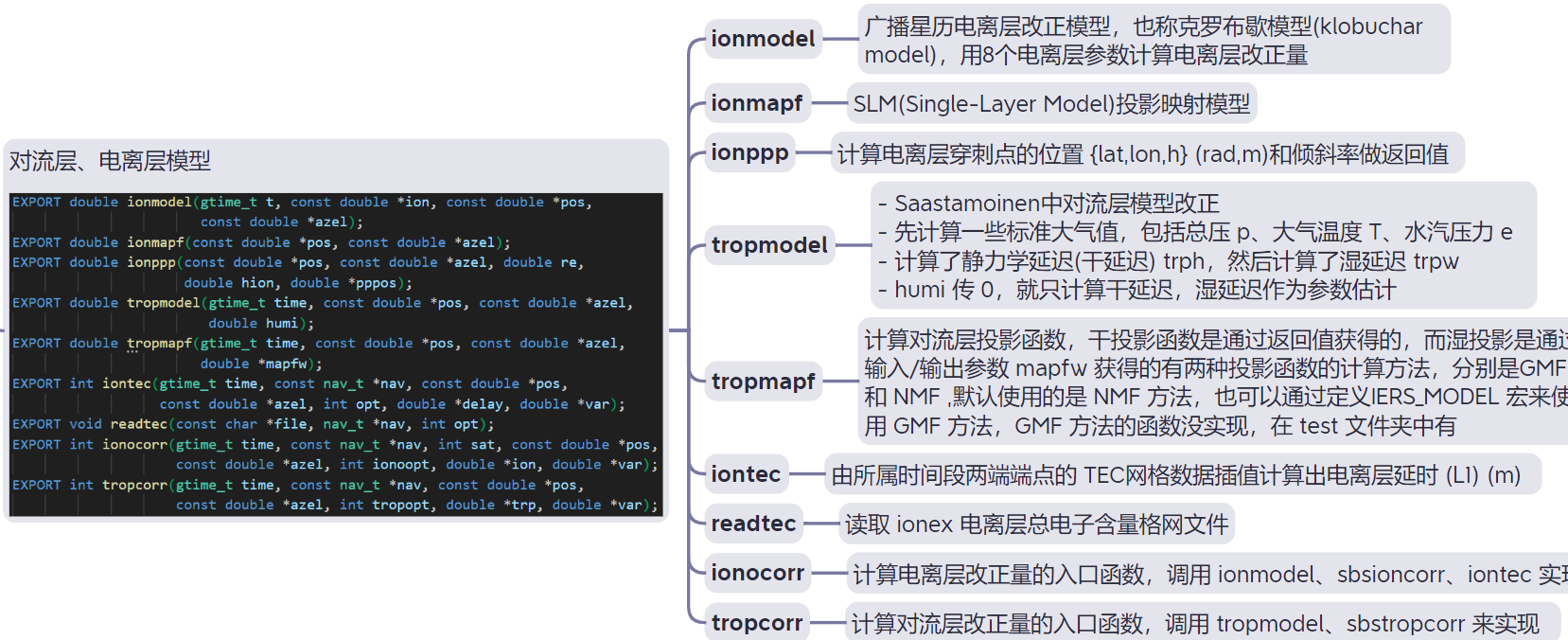
图1.4-21 对流层、电离层模型[1]
5. 天线改正:读取天线文件

图1.4-22 天线改正:读取天线文件[1]
6. 潮汐改正

图1.4-23 潮汐改正[1]
7. 水准面模型

图1.4-24 水准面模型[1]
8. 高程转换
都是转日本的高程系统,咱们用不到。

图1.4-25 高程转换[1]
1.4.10 杂项函数
1. 结果格式转换
把定位结果转为 KML、GPX 格式:
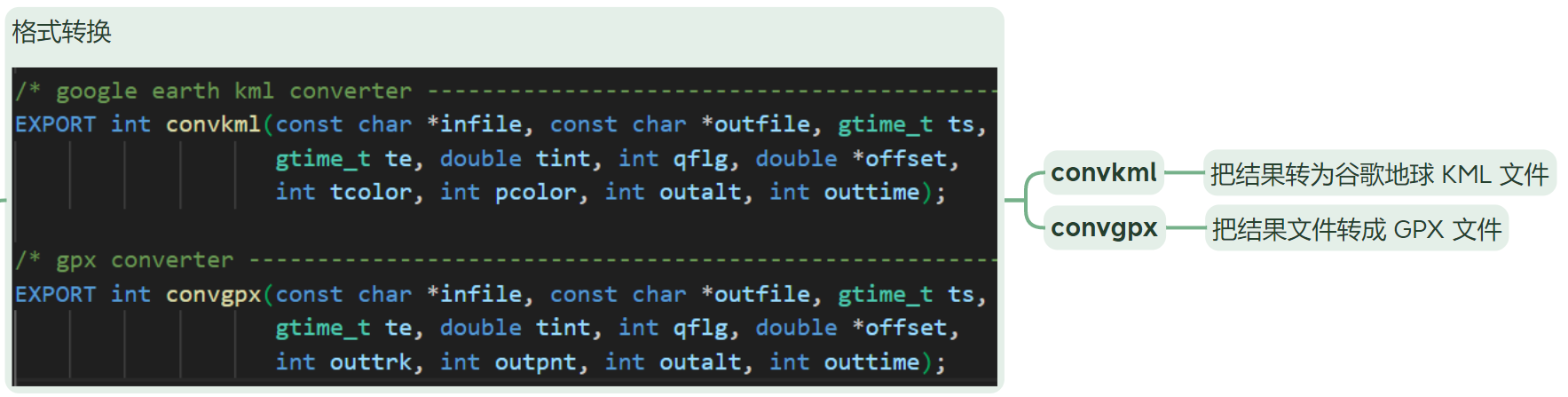
图1.4-26 结果格式转换[1]
2. GIS 数据读取
可以读取 shapfile 矢量数据。

图1.4-27 GIS 数据读取[1]
3. 平台相关函数
在 Windows 和 Linux 有完全不同的两套实现。

图1.4-28 平台相关函数[1]