
1 摘要
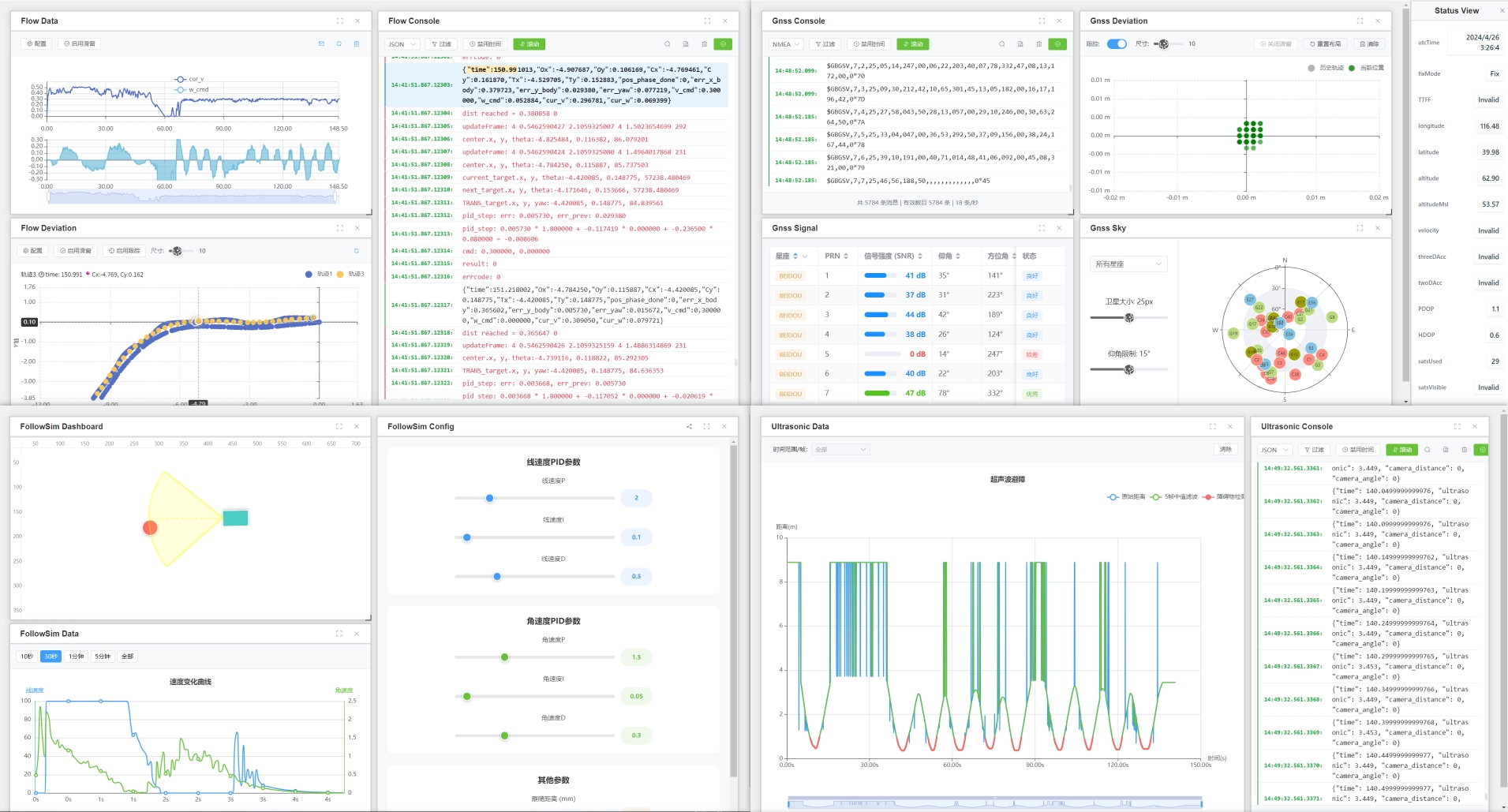
图1-1: Nav-Tools 示意图
Nav-Tools 是一款专为机器人开发者打造的桌面级可视化工作台,全面覆盖机器人复合应用与主流传感器。目前已集成通用数据流 Flow、GNSS 定位模块、超声波避障、PID 跟随仿真和电机驱动等功能,支持布局与数据字段的灵活自定义,极大提升调试效率与开发体验。应用下载请查看:
https://github.com/salmoshu/Nav-Tools/releases
核心特性
- 🌱 简洁可扩展:目录结构清晰,支持快速添加新模块
- 🖥 多窗口支持:轻松实现多窗口并行调试
- 📊 实时可视化:支持时序图、轨迹图、控制台、仪表盘等多种展示方式
- 🧩 高度自定义:支持字段扩展、滑窗、过滤、颜色配置、布局保存等高级功能
支持模块与应用
| 应用 | 模块名称 | 功能描述 |
|---|---|---|
| ROBOT | Flow | 通用数据流可视化(时序图、轨迹图、控制台) |
| PERC | Ultrasonic | 超声波避障数据可视化(滤波、障碍物检测) |
| POS | GNSS | 卫星定位模块(轨迹、信号、星空图) |
| PNC | Motor | 电机驱动的控制下发与数据可视化 |
| FollowSim | PID 跟随仿真(仪表盘、速度曲线、参数配置) |