
2 基本使用
2.1 菜单栏
图2-1: Nav-Tools 菜单栏
菜单栏汇集了当前所有的应用与模块。
- ROBOT(机器人应用)
- Flow(数据流):整合了机器人开发中通用且常见的可视化需求
- PERC(感知模块)
- Ultrasonic(超声波):避障滤波处理
- POS(定位模块)
- GNSS(卫星导航):基本实现了常见的GNSS上位机功能
- PNC(规划与控制)
- Motor(电机驱动):实现了电机驱动的控制下发与数据可视化
- FollowSim(PID跟随仿真):实现了基于PID的跟随机器人仿真
- SETTING(设置)
- 页面刷新设置
- 视图放缩设置
2.2 工具栏

图2-2: Nav-Tools 工具栏
- 工具栏拖拽锚点:工具栏能吸附在上下左右四个方向的边框上
- 设备连接开关:用于开启设备连接,并接通实时数据,不过要求在Input中进行配置设备信息
- 设备配置(输入配置):当前支持串口输入、文件输入(文件类型支持拖拽)
- 状态栏视图:用于显示或隐藏状态栏,每个应用均包含状态栏
- 可视化组件:根据应用的不同,将加载不同的可视化组件,例如
- Flow应用加载Data、Console和Deviation组件;
- GNSS应用Console、Deviation、Signal和Sky组件。
- 页面布局
- Save:当页面布局更改时,触发是否保存
- Auto:将当前组件调节为紧凑布局
- Reset:恢复默认组件布局
2.3 状态栏
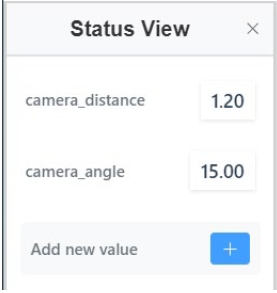
图2-3: Nav-Tools 状态栏
根据应用的不同,状态栏将加载不同的数据状态。
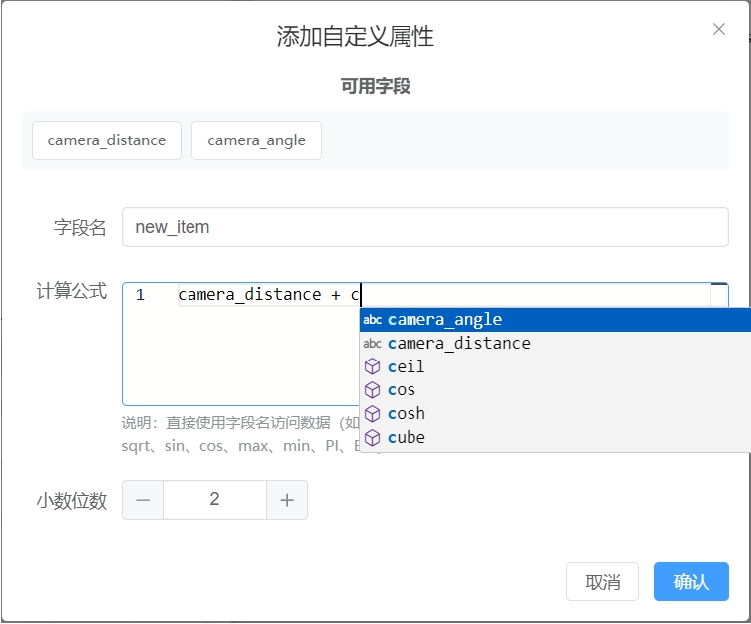
图2-4: 状态栏自定义属性
部分应用(如Flow)支持Add new value功能,可以基于现有数据创建新的字段。