
3 机器人应用(Robot)
3.1 Flow 数据流
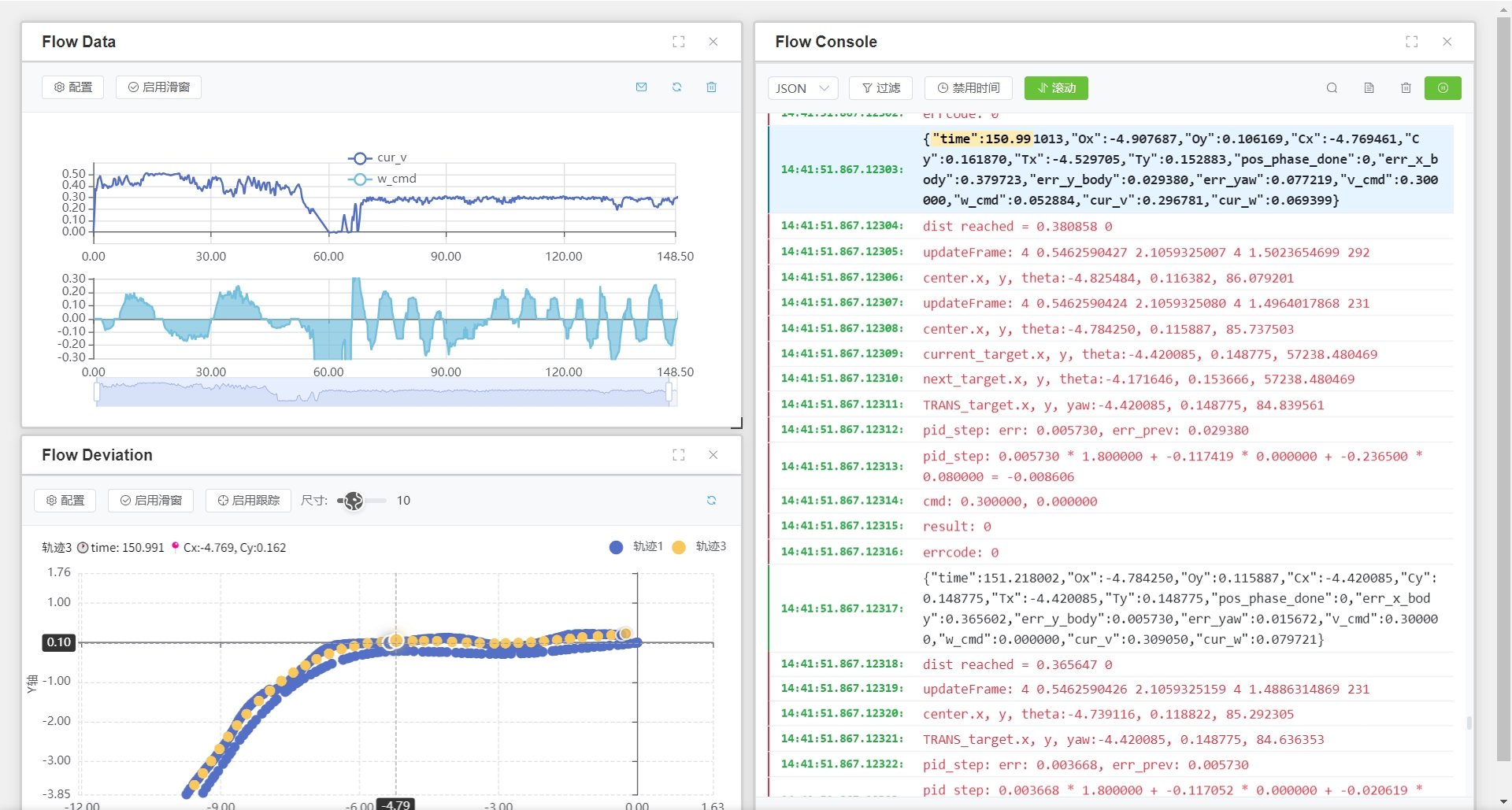
图3-1: 机器人Flow数据流
Flow考虑了机器人常见的可视化需求,例如数据的时序变化、原始日志和轨迹偏移。Flow要求的数据采用JSON格式,并以换行符分隔,每行一个JSON对象,以下为一段示例数据:
text
{"time": 0.00, "camera_distance": 1.20, "camera_angle": 0.5, "pid_left_speed": 0.30, "pid_right_speed": 0.30, "motor_left_speed": 0.28, "motor_right_speed": 0.28}
{"time": 0.05, "camera_distance": 1.18, "camera_angle": 0.4, "pid_left_speed": 0.30, "pid_right_speed": 0.30, "motor_left_speed": 0.29, "motor_right_speed": 0.29}
{"time": 0.10, "camera_distance": 1.15, "camera_angle": 0.3, "pid_left_speed": 0.31, "pid_right_speed": 0.30, "motor_left_speed": 0.30, "motor_right_speed": 0.29}3.1.1 日志组件(Console)
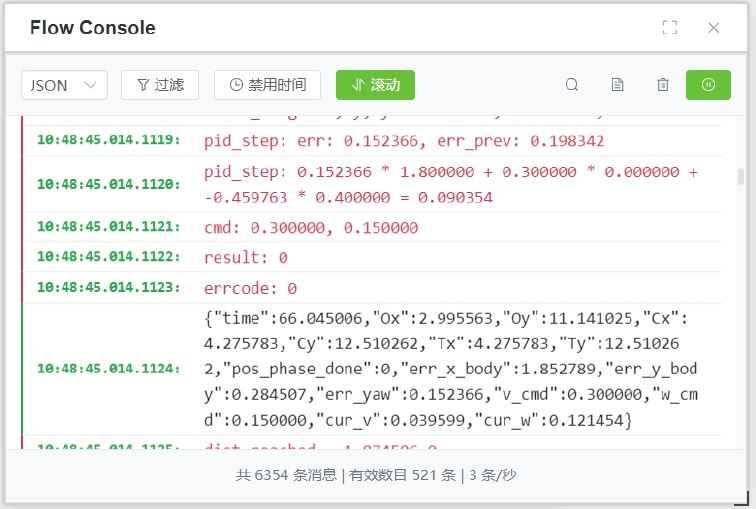
图3-2: 日志组件(Console)
- 控制区
- 数据过滤:用于过滤感兴趣的数据(当前支持JSON、NMEA)
- 启用时间/禁用时间:启用或禁用时间戳
- 置底/滚动:将窗口吸附在底部或使用鼠标手动滚动窗口;
- 搜索:字段搜索
- 保存:保存日志
- 清除:清空控制台
- 继续/暂停:继续或暂停呈现控制数据(仅用于实时数据)
- 内容区
- 黑色字体为有效数据,红色字体为其他数据、黄色字体为搜索目标。
- 状态区
- 消息总数
- 有效数目
- 数据接收速率
3.1.2 时序数据(Data)
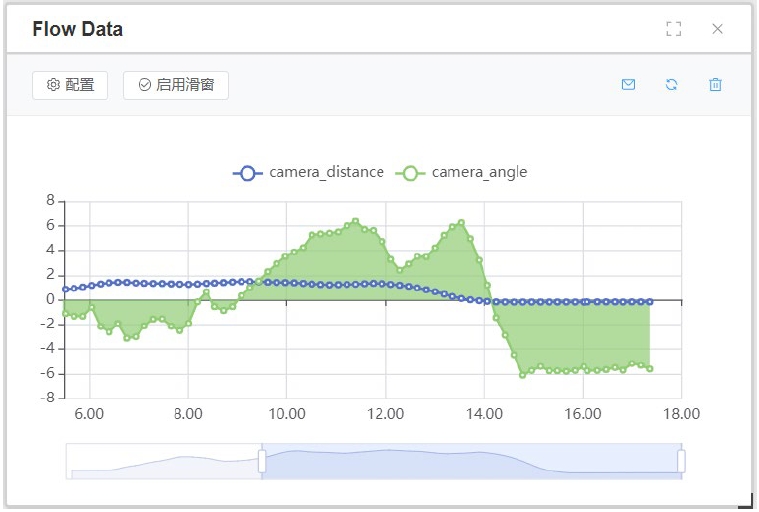
图3-3: 时序数据(Data)
- 配置
- 视图布局(支持单图单Y轴、单图双Y轴、双图单Y轴、双图双Y轴)
- 字段选择(Flow会自动从JSON中解析字段)
- 取色器与填充(可自定义颜色及是否填充)
- 启用/关闭滑窗:滑窗会显示最新的100条数据(实时工作时,将强制启用滑窗以保证应用性能)
- 消息格式
- 刷新:恢复放缩状态
- 清除:清空所有数据
3.1.3 轨迹数据(Deviation)
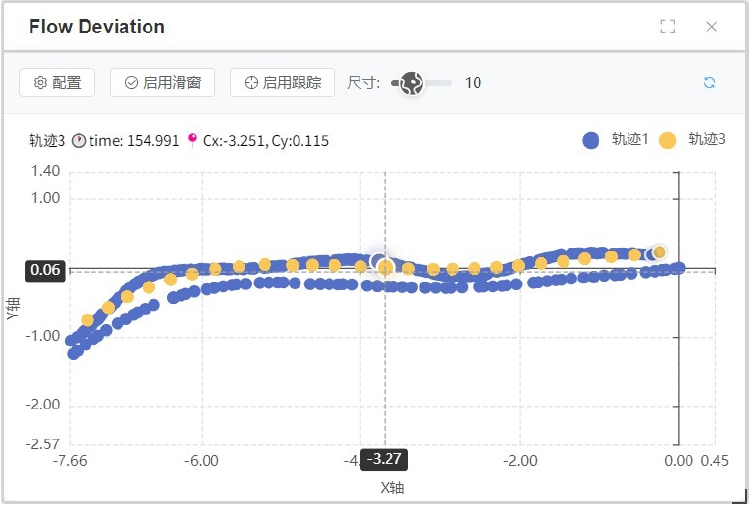
图3-4: 轨迹数据(Deviation)
- 配置:配置轨迹字段与颜色,当前最多支持4条轨迹
- 启用/关闭滑窗:滑窗会显示最新的100条数据(实时工作时,将强制启用滑窗以保证应用性能)
- 启用/关闭跟踪:启用跟踪将保持最新点始终在(0,0)点
- 尺寸:调节轨迹尺寸
- 刷新:恢复放缩状态