
3. 后处理程序
3.1 基本使用
推荐 B 站赵老师的视频讲解[24],看视频学软件操作更直观,后文主要参考资料[1]中的相关笔记。
3.1.1 RTKGET 数据下载
GNSS 观测数据及各种产品下载网址可以参考资料[25],有关 RTKGET 的更多内容请查看 RTKLIB-Manual-CN 3.9 节。
1. 数据下载
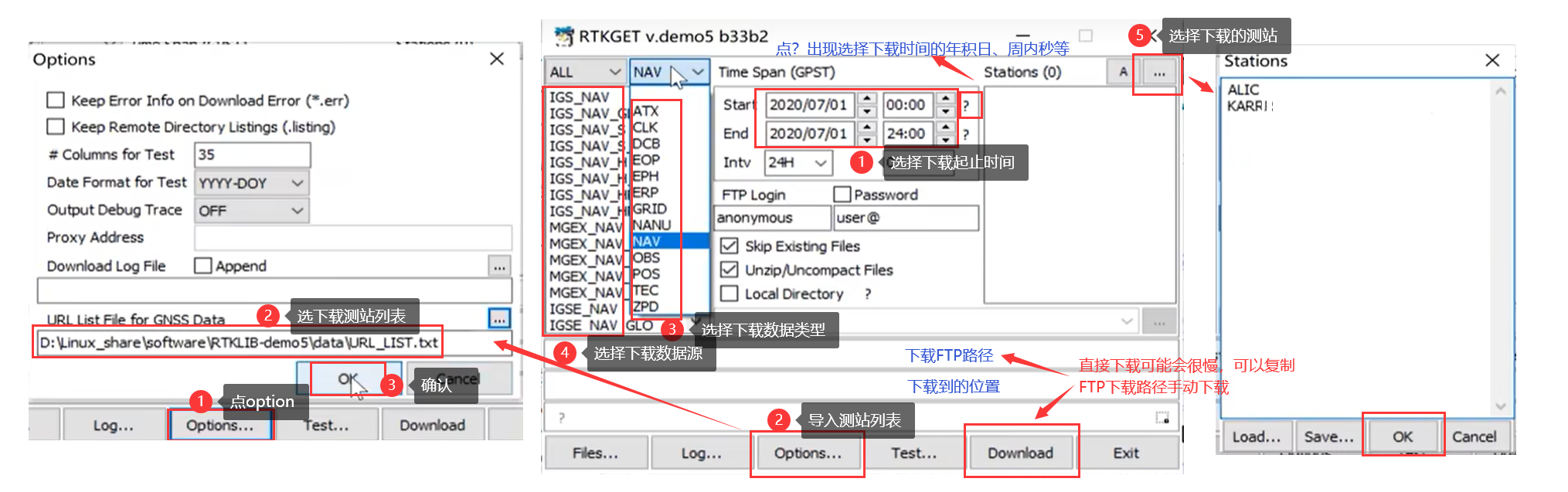
- 设置时间范围:选择下载数据的起止时间;
- 配置 URL_LIST:
- 加载文件:在 RTKLIB 的 options 中加载
URL_LIST.txt(位于源码版 data 文件夹,建议使用源码版)。 - 效果:列表文件加载后,界面左侧显示数据源列表。
- 加载文件:在 RTKLIB 的 options 中加载
- 数据类型:
- OBS:原始观测数据(伪距、载波相位)。
- NAV:广播轨道信息。
- EPH:精密轨道数据。
- CLK:精密钟差数据。
- ATX:天线相位中心校正。
- 相对定位数据下载:
- 选择分析中心:如 IGS、MGEX。
- 添加测站:点击 “...” 选择测站(如 ALIC、KARR)。
- 下载:
- 选中测站,点击 “Download”,数据存至指定目录(速度可能较慢)。
- 或复制 FTP 路径,通过浏览器直接下载。
- 批量处理:Linux 环境下可用脚本自动化下载。
2. 用 RTKGET 做时间转换
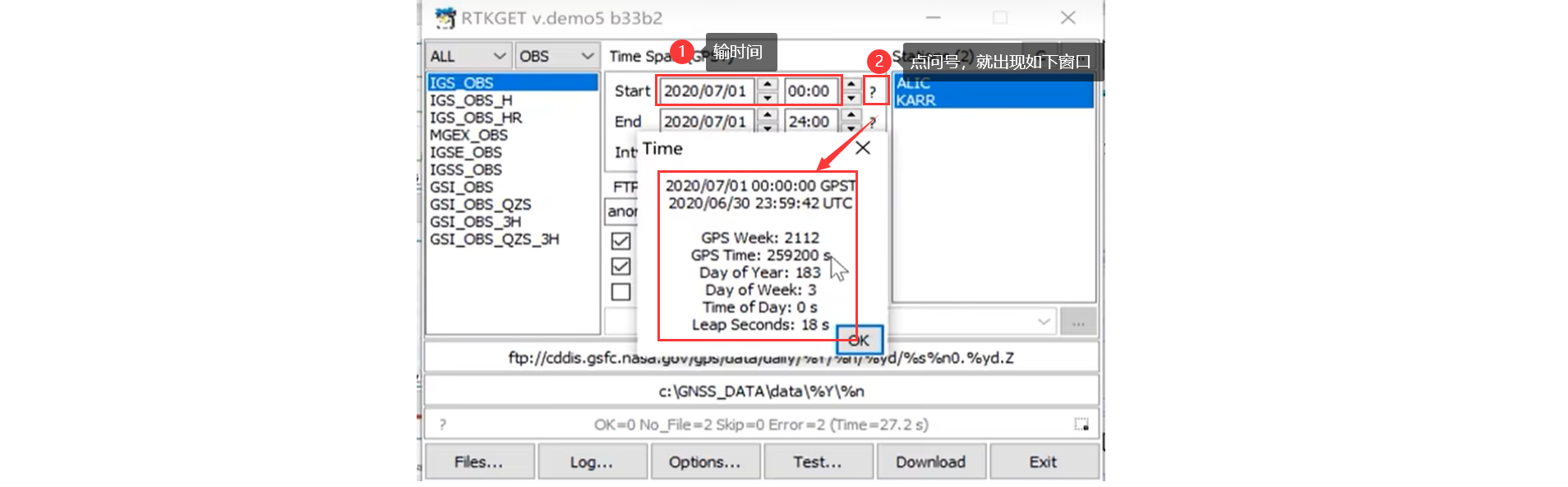
- 输入年月日时分秒:
- 点击“?”查看支持的时间格式,下载观测值需要提供年积日(DOY)。修改链接中的日期,即可下载对应的观测值文件(OBS)。
3. 数据命名格式
- 命名格式:
测站名(4位)+机构信息+年+年积日(DOY)+采样间隔。 - 压缩格式:
.crx:压缩观测数据。.gz:压缩格式。.o.z:单次压缩的观测文件。
4. 星历下载
- 工具:使用RTKLIB的rtkget或FTP下载。
- 文件类型:
- 广播星历(NAV):卫星广播轨道信息。
- 精密星历(EPH):高精度卫星轨道数据。
3.1.2 RTKCONV 数据转换
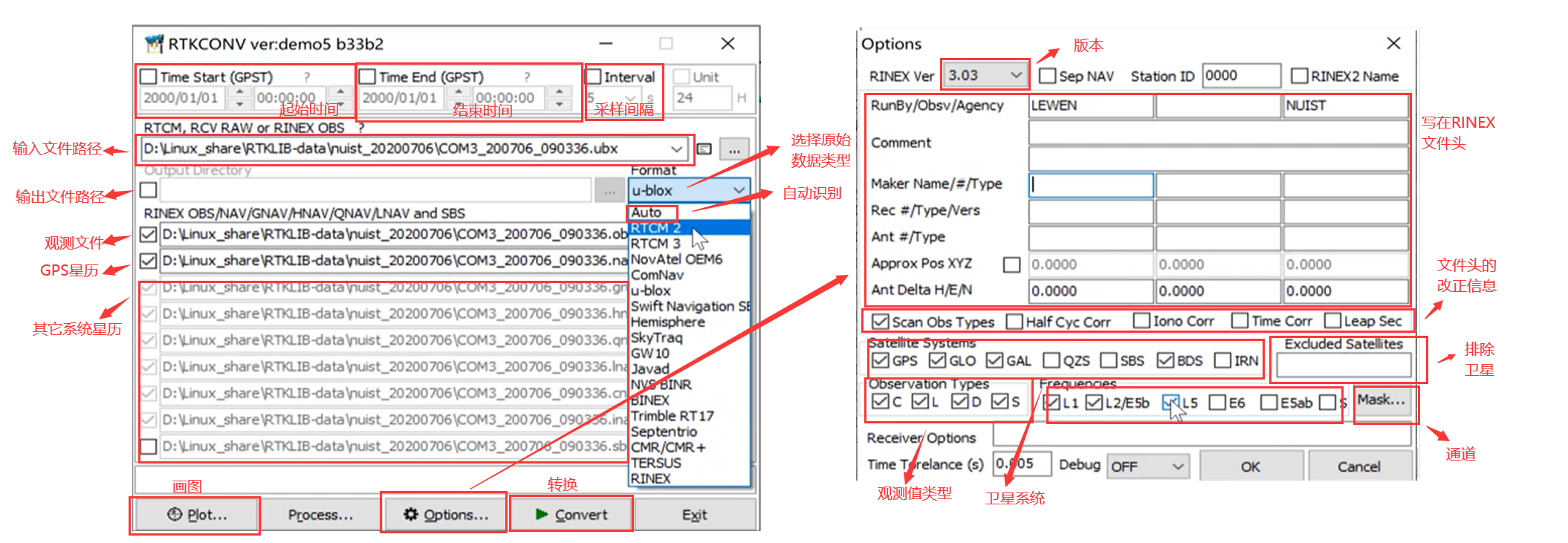
1. RTKCONV使用步骤
有关 RTKCONV 的更多内容,请查看 RTKLIB-Manual-CN 3.6节。
- 设置参数:
- 时间范围:选择数据的起止时间。
- 采样率:设置 Interval(如1秒、5秒)。
- 输入文件:指定原始数据路径。
- 格式选择:支持 u-blox、RINEX、RTCM3 等,未知格式可选“Auto”。
- 输出数据:勾选所需文件,常用OBS(观测数据),如需导航电文(NAV),需勾选。
- 配置信息:
- RINEX版本:选择版本号(如 3.03)。
- 测站信息:测站 ID、RunBy(可填个人/机构)、天线/接收机类型(可选)、近似坐标、改正信息。
- 输出选项:选择 GNSS 系统(如 GPS、GLONASS)、观测值类型(全选推荐)、观测频率、信号通道。
- 执行转换:点击 “Convert” 生成 RINEX 文件。
2. 数据质量可视化
点击“Plot”可以查看数据质量,有关该部分的更多内容请查看 RTKLIB-Manual-CN 3.8 节。
- Sat Vis:卫星可见性,显示频率,颜色表示信噪比(SNR)。
- Skyplot:站心地平坐标系下的卫星天空视图,反映低高度角卫星信号质量。
- DOP:上部显示可见卫星数,下部显示DOP值(几何精度因子)。
- SNR:载噪比及多路径分析,可选特定卫星/频率,横坐标支持时间或高度角。
3.1.3 RTKPOST 数据后处理
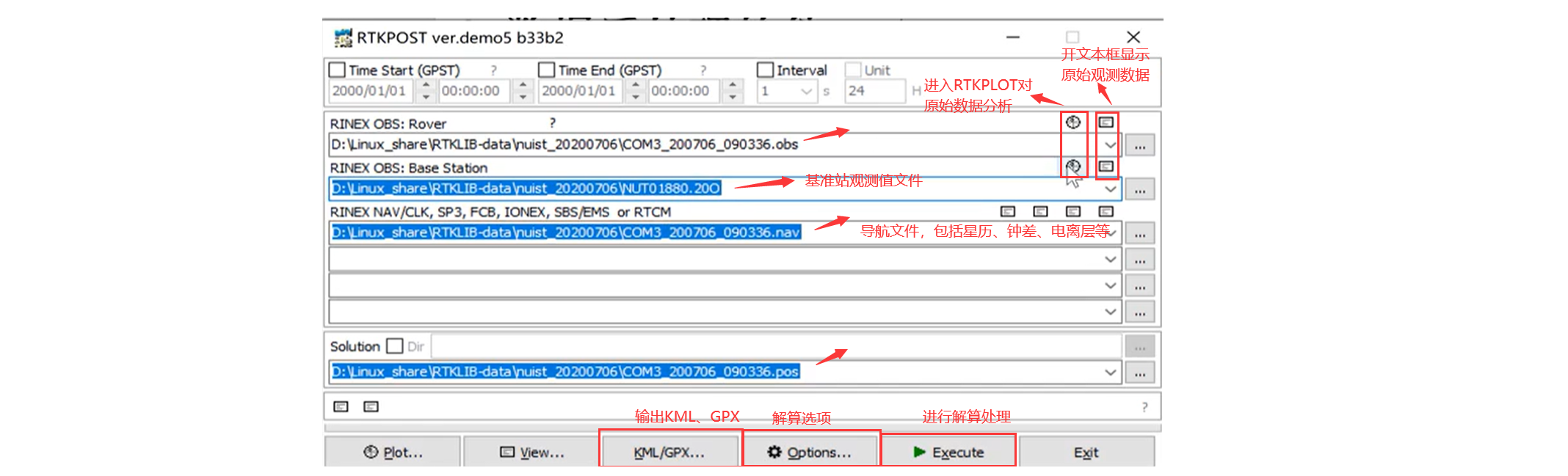
1. 主界面操作
RTKPOST 一定程度上可以参考 RTKNAVI 的使用,这部分可以参考 2.1 RTKNAVI 使用示例。不过 RTKPOST 解算会更快,并且其中包含了只有后处理才能拥有的一些手段。参数部分使用可以参考 附录 F 配置文件。
- 设置解算参数:
- 起止时间:指定解算时间范围。
- 解算间隔:设置采样率。
- 加载数据:
- RINEX OBS:加载流动站(Rover)和基准站(Base)观测数据。点击右上角天空图标,打开 RTKPLOT 查看数据状态。基准站数据量大,可截取与流动站对应的时间段。
- 其他数据:加载NAV(导航电文)、CLK(精密钟差)、SP3(精密轨道)等。接收机NAV仅包含其观测卫星星历,可从网上下载全系统导航电文。
- 输出路径:默认在流动站文件路径,输出文件后缀为.pos。
2. 结果可视化
- Plot:对解算结果进行可视化分析,查看结果的状态(固定或浮点解)
- view:查看解算结果的文本信息,类似记事本
- KML:转为 GoogleKML 可把结果展示到地图上
3. PPP 数据处理
- 实时PPP:IGS/MGEX 分析中心播发的实时卫星轨道和钟差产品,结合广播星历
- 事后或近实时:下载精密星历、钟差产品,结合其它精密改正信息实现定位
- RTKLIB 使用必须给广播星历,因为解算前都会先进行一次伪距单点定位
3.2 源码解析
rtkpos() 算法核心函数将在后续相对定位章节进行解析,这里仅分析算法以外的业务函数。
3.2.1 rnx2rtkp():主函数
1. 执行流程
- 读取配置文件过程:
- 循环判断参数是否有
-k,如果有就代表传入了配置文件,需要读取进来 - 创建
porcopt_t、solopt_t、filopt_t变量用于接受读取到的配置 - 调用
resetsysopts(),重置配置为默认值。 - 调用
loadopts(),从文件中读取配置,存到opt_t类型的sysopt中。 - 调用
getsysopts(),把opt_t类型的sysopt转到porcopt_t、solopt_t、filopt_t变量中,会调用buff2sysopts()。
- 循环判断参数是否有
- 读其它参数:
- 循环内,
if-else if,判断参数,根据参数赋值 - 若都不是参数,最后一个到
else if,认为是文件路径,用infile数组接收
- 循环内,
- 最后调用
postpos()后处理解算
2. 源码注释
点击查看代码
int main(int argc, char **argv)
{
prcopt_t prcopt=prcopt_default; // 定位处理模式
solopt_t solopt=solopt_default; // 结果输出形式
filopt_t filopt={""}; // 文件路径选项
gtime_t ts={0},te={0}; // ts开始时间、te结束时间
double tint=0.0,
es[]={2000,1,1,0,0,0},
ee[]={2000,12,31,23,59,59},
pos[3];
int i, // for循环的计数
j, // 嵌套的for循环计数
n, // 记录读入文件数
ret; // 接受postpos的返回值
char *infile[MAXFILE], // 读入文件,默认最多16个,可改MAXFILE定义
*outfile="", // 输出文件
*p; // 指向字符串的指针,用于循环指向各main函数参数
prcopt.mode =PMODE_KINEMA; // 定位模式默认动态相对定位Kinematic
prcopt.navsys=0; // 卫星系统,先设置无
prcopt.refpos=1; // 基准站坐标,先设为由SPP平均解得到
prcopt.glomodear=1; // GLONASS AR mode,先设on
solopt.timef=0; // 输出时间格式,先设sssss.s
sprintf(solopt.prog ,"%s ver.%s %s",PROGNAME,VER_RTKLIB,PATCH_LEVEL); // 项目名称
sprintf(filopt.trace,"%s.trace",PROGNAME);
/* load options from configuration file */
for (i=1;i<argc;i++) {
if (!strcmp(argv[i],"-k")&&i+1<argc) { // 如果有-k和配置文件输入
resetsysopts(); // 先重置所有配置
if (!loadopts(argv[++i],sysopts)) return -1;// 再读取配置文件内容,存入opt_t的sysopt中
getsysopts(&prcopt,&solopt,&filopt); // opt_t转到porcopt_t/solopt_t/filopt_t,
}
}
// for 循环判断 main 函数参数
for (i=1,n=0;i<argc;i++) {
if (!strcmp(argv[i],"-o")&&i+1<argc) outfile=argv[++i];//读取输出文件路径,赋值给outfile
else if (!strcmp(argv[i],"-ts")&&i+2<argc) { // 读取开始解算时间
sscanf(argv[++i],"%lf/%lf/%lf",es,es+1,es+2);
sscanf(argv[++i],"%lf:%lf:%lf",es+3,es+4,es+5);
ts=epoch2time(es); // 转为gtime_t
}
else if (!strcmp(argv[i],"-te")&&i+2<argc) { // 读取结束解算时间
sscanf(argv[++i],"%lf/%lf/%lf",ee,ee+1,ee+2);
sscanf(argv[++i],"%lf:%lf:%lf",ee+3,ee+4,ee+5);
te=epoch2time(ee); // 转为gtime_t
}
else if (!strcmp(argv[i],"-ti")&&i+1<argc) tint=atof(argv[++i]); // 读取解算时间间隔频率
else if (!strcmp(argv[i],"-k")&&i+1<argc) {++i; continue;} // 有-k,跳过
else if (!strcmp(argv[i],"-p")&&i+1<argc) prcopt.mode=atoi(argv[++i]); // 读取解算模式
else if (!strcmp(argv[i],"-f")&&i+1<argc) prcopt.nf=atoi(argv[++i]); // 读取用于计算的频率
else if (!strcmp(argv[i],"-sys")&&i+1<argc) { // 读取用于计算的导航系统
for (p=argv[++i];*p;p++) {
switch (*p) { //有对应导航系统,就把它的码做与运算加上
case 'G': prcopt.navsys|=SYS_GPS;
case 'R': prcopt.navsys|=SYS_GLO;
case 'E': prcopt.navsys|=SYS_GAL;
case 'J': prcopt.navsys|=SYS_QZS;
case 'C': prcopt.navsys|=SYS_CMP;
case 'I': prcopt.navsys|=SYS_IRN;
}
if (!(p=strchr(p,','))) break;
}
}
else if (!strcmp(argv[i],"-m")&&i+1<argc) prcopt.elmin=atof(argv[++i])*D2R; // 设置截止高度角
else if (!strcmp(argv[i],"-v")&&i+1<argc) prcopt.thresar[0]=atof(argv[++i]); // 设置整周模糊度Ratio值
else if (!strcmp(argv[i],"-s")&&i+1<argc) strcpy(solopt.sep,argv[++i]); // 设置文件路径分隔符
else if (!strcmp(argv[i],"-d")&&i+1<argc) solopt.timeu=atoi(argv[++i]); // 设置时间小数位数
else if (!strcmp(argv[i],"-b")) prcopt.soltype=1; // 后向滤波
else if (!strcmp(argv[i],"-c")) prcopt.soltype=2; // 前后向滤波组合
else if (!strcmp(argv[i],"-i")) prcopt.modear=2; // 单历元模糊度固定
else if (!strcmp(argv[i],"-h")) prcopt.modear=3; // fix and hold 模糊度固定
else if (!strcmp(argv[i],"-t")) solopt.timef=1; // 输出时间格式为 yyyy/mm/dd hh:mm:ss.ss
else if (!strcmp(argv[i],"-u")) solopt.times=TIMES_UTC; // 输出为 UTC 时间
else if (!strcmp(argv[i],"-e")) solopt.posf=SOLF_XYZ; // 输出 XYZ-ecef 坐标
else if (!strcmp(argv[i],"-a")) solopt.posf=SOLF_ENU; // 输出 ENU-baseline
else if (!strcmp(argv[i],"-n")) solopt.posf=SOLF_NMEA; // 输出 NMEA-0183 GGA
else if (!strcmp(argv[i],"-g")) solopt.degf=1; // 输出经纬度格式为 ddd mm ss.ss
else if (!strcmp(argv[i],"-r")&&i+3<argc) { // 基站位置E CEF-XYZ (m)
prcopt.refpos=prcopt.rovpos=0; // 基准站和流动站位置都先设0
for (j=0;j<3;j++) prcopt.rb[j]=atof(argv[++i]); // 循环存入基准站坐标
matcpy(prcopt.ru,prcopt.rb,3,1);
}
else if (!strcmp(argv[i],"-l")&&i+3<argc) { // 循环存入基站位置基站位置LLH (deg/m)
prcopt.refpos=prcopt.rovpos=0; // 基准站和流动站位置都先设0
for (j=0;j<3;j++) pos[j]=atof(argv[++i]);
for (j=0;j<2;j++) pos[j]*=D2R; // 角度转弧度
pos2ecef(pos,prcopt.rb); // LLH 转 XYZ
matcpy(prcopt.ru,prcopt.rb,3,1);
}
else if (!strcmp(argv[i],"-y")&&i+1<argc) solopt.sstat=atoi(argv[++i]); //输出结果信息
else if (!strcmp(argv[i],"-x")&&i+1<argc) solopt.trace=atoi(argv[++i]); //输出debug trace等级
else if (*argv[i]=='-') printhelp(); //输入-,打印帮助
else if (n<MAXFILE) infile[n++]=argv[i]; //循环判断完一遍参数之后,认为参数是文件路径,用infile数组接收
}
if (!prcopt.navsys) { //如果没设卫星系统,默认为GPS、GLONASS
prcopt.navsys=SYS_GPS|SYS_GLO;
}
if (n<=0) { //如果读入文件数为0,报错,-2退出
showmsg("error : no input file");
return -2;
}
// gtime_t ts I processing start time (ts.time==0: no limit)
// gtime_t te I processing end time (te.time==0: no limit)
// double ti I processing interval (s) (0:all)
// double tu I processing unit time (s) (0:all)
// prcopt_t *popt I processing options
// solopt_t *sopt I solution options
// filopt_t *fopt I file options
// char **infile I input files (see below)
// int n I number of input files
// char *outfile I output file ("":stdout, see below)
// char *rov I rover id list (separated by " ")
// char *base I base station id list (separated by " ")
//后处理定位解算
ret=postpos(ts,te,tint,0.0,&prcopt,&solopt,&filopt,infile,n,outfile,"","");
if (!ret) fprintf(stderr,"%40s\r","");
return ret;
}3.2.2 postpos():后处理定位解算
1. 概述
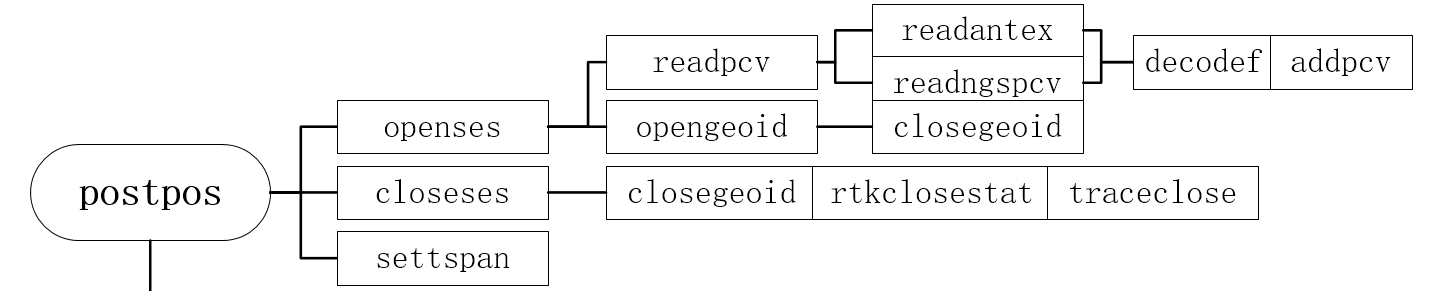
后处理定位的主入口函数,根据 tu 分计算时间段,调用调用execses_b()进行下一步解算,输入文件包括观测文件、导航文件、精密星历文件等,postpos 在处理输入文件时有两种方法:
- 一种是输入文件可以只包含替换,然后通过函数
reppath()处理,将关键词用时间、基准站编号、流动站编号等代替; - 另一种是直接调用输入文件的文件名,
2. 参数列表
/* args */
gtime_t ts I 处理的起始时间,写 0 表示不限制
gtime_t te I 处理的起始时间,写 0 表示不限制
double ti I 处理的间隔时间(s),写 0 表示不限制,全处理
double tu I 处理的单元时间(s),写 0 表示全部做一个单元处理
prcopt_t *popt I 处理选项结构体
solopt_t *sopt I 结果选项结构体
filopt_t *fopt I 文件选项结构体
char **infile I 传入文件路径数组首地址
int n I 传入文件数量
char *outfile I 输出文件的路径,写 0 表示 stdout 终端
char *rov I 流动站 ID 列表,空格隔开
char *base I 基准站 ID 列表,空格隔开
/* return */
int ret - 0:成功,0>:失败,1:中断3. 执行流程
变量定义,
stat默认为0,flag默认为1。调用
openses(),开始解算进程,读取天线、大地水准面文件。判断起始解算时间
ts、结束解算时间te、解算时间单元tu,有三种情况:- 为何要判断:拆分时间段解算需要tu值有效、调用reppath需要ts有效,调用reppaths需要ts和te有效。
- ifile[]、ofile[]作用:infile[]、ofile[]里的路径替换处理后存到ifile[]、ofile[],传入
execses_b()进行之后的解算。 - index[]的作用:会传给
execses_b(),再传给execses_r(),再传给execses(),再传给readobsnav()。如果不需要根据tu分时间段解算,index存的就是0~n,如果需要分时间段解算,index存的是对应时间段内文件的下标。
情况1:若
ts、te不为0,tu大于等于0:- 判断
te早于ts,return - 为
ifile[]数组空间 - 处理解算时间单元
tu,0或者时间大于100天,设为100天 - 循环处理每个时间单元
tts到tte: - 计算解算时间单元的开始
tts、结束tte,判断tts<ts则设为ts,tte>te设为te- 流动站、基准站名赋空值
- 遍历遍历infile[],
strrchr找文件后缀名,strcmp判断后缀名 :- rtcm3:直接把
infile[j]中路径赋值到ifile[]中 - 星历文件:精密星历
ttte=tte+一小时、广播星历ttte=tte+两小时,根据tts、ttte调用reppaths()将infile[j]中路径展开到ifile[nf]中。 之后把infile[]的下标j存到index[]中。
- rtcm3:直接把
- 调用
reppath()替换outfile的替换符,存到ofile中。 - 调用
execses_b()进行下一步解算。
- 判断
情况2:若
ts不为0,tu为0或小于0 :就不考虑te、和tu- 为
ifile[]开辟空间,循环替换infile[i]的替换符到ifile[i]中。 - 调用
reppath替换outfile的替换符,存到ofile中。 - 调用
execses_b()进行下一步解算。
- 为
情况3:若
ts为0:- 直接把把
infile[]的下标j存到index[]中,调用execses_b进行下一步解算
- 直接把把
4. 注意事项
postpos()冗长的代码段主要是来判断是哪一种输入方式,然后调用相应函数进行处理,一般不用看太仔细的去看。postpos()调用了一些小函数,这样将不会详细展开:openses():开始解算进程,读取天线、大地水准面文件readpcv():读取天线文件,会调用readantex()、readngspcv()opengeoid():读取 geoid 文件,会调用closegeoid()
closeses():结束解算程序,释放天线、geoid、erp、trace、fp_stat。会调用closegeoid()、rtkclosestat()、traceclose()。reppaths():根据ts和te分时间段,循环调用reppath(),替换path[]中的替换符,存到repath[]中,返回文件数量reppath():如果输入文件(file)中,含有替换符,则reppath()函数的目的就是将文件名中的替换符调用repstr()进行替换,保存到rpath中。替换符如下:
reppaths()需要ts和te、而reppath()只用ts。
5. 源码注释
点击查看代码
extern int postpos(gtime_t ts, gtime_t te, double ti, double tu,
const prcopt_t *popt, const solopt_t *sopt,
const filopt_t *fopt, char **infile, int n, char *outfile,
const char *rov, const char *base)
{
gtime_t tts, //解算单元的开始时间
tte, //解算单元的结束时间
ttte; //读取星历文件的结束时间
double tunit, //
tss; //
int i,j,k, //循环和数组下标控制
nf, //文件路径数组下标控制
stat=0, //接收返回状态值,为1
week, //用于存GPST的周
flag=1,
index[MAXINFILE]={0};
char *ifile[MAXINFILE],
ofile[1024],
*ext;
trace(3,"postpos : ti=%.0f tu=%.0f n=%d outfile=%s\n",ti,tu,n,outfile);
/* open processing session */ //开始处理,文件读取,赋值navs、pcvs、pcvsr
if (!openses(popt,sopt,fopt,&navs,&pcvss,&pcvsr)) return -1;
if (ts.time!=0&&te.time!=0&&tu>=0.0) { //判断起始时间ts、te、处理单位时间是否大于0
if (timediff(te,ts)<0.0) { //结束时间早于开始时间
showmsg("error : no period");
closeses(&navs,&pcvss,&pcvsr); //不合理则关闭处理,释放navs、pcvs、pcvsr
return 0;
}
for (i=0;i<MAXINFILE;i++) {
if (!(ifile[i]=(char *)malloc(1024))) { //为infile数组malloc开辟空间
for (;i>=0;i--) free(ifile[i]); //开辟失败则释放已开辟的空间,关闭处理释放navs、pcvs、pcvsr
closeses(&navs,&pcvss,&pcvsr);
return -1;
}
}
if (tu==0.0||tu>86400.0*MAXPRCDAYS) tu=86400.0*MAXPRCDAYS; //解算处理时间单元处理,0或者时间大于100天,设为100天
settspan(ts,te); //设置时间跨度,好像是空函数,需要自己实现
tunit=tu<86400.0?tu:86400.0; //tunit:如果tu小于一天就为tu;否则为一天
tss=tunit*(int)floor(time2gpst(ts,&week)/tunit); //
//根据解算时间单元,分时间段循环处理,算出来tts>te或过程有错误,结束循环
//很多时候解算单元时间直接设0.0,只循环一次,tts=ts,tte=te
for (i=0;;i++) { /* for each periods */
tts=gpst2time(week,tss+i*tu); //解算单元开始时间,每次循环加上一个i个tu?
tte=timeadd(tts,tu-DTTOL); //解算结束时间tte=tu-DTTOL
if (timediff(tts,te)>0.0) break; //算出来tts>te结束循环
if (timediff(tts,ts)<0.0) tts=ts; //分时间段后tts若早于ts,设为ts
if (timediff(tte,te)>0.0) tte=te; //分时间段后tte若早于te,设为te
strcpy(proc_rov ,""); //流动站、基准站值赋空
strcpy(proc_base,"");
if (checkbrk("reading : %s",time_str(tts,0))) {
stat=1;
break;
}
for (j=k=nf=0;j<n;j++) { //遍历infile[],根据后缀名
ext=strrchr(infile[j],'.'); //ext:文件路径中.后缀开始的位置
if (ext&&(!strcmp(ext,".rtcm3")||!strcmp(ext,".RTCM3"))) { //rtcm3文件
strcpy(ifile[nf++],infile[j]);
}
else { //星历文件,包括精密星历和广播星历
/* include next day precise ephemeris or rinex brdc nav */
ttte=tte;
if (ext&&(!strcmp(ext,".sp3")||!strcmp(ext,".SP3")||
!strcmp(ext,".eph")||!strcmp(ext,".EPH"))) {
ttte=timeadd(ttte,3600.0); //精密星历加一小时
}
else if (strstr(infile[j],"brdc")) {
ttte=timeadd(ttte,7200.0); //广播星历加两小时
}
nf+=reppaths(infile[j],ifile+nf,MAXINFILE-nf,tts,ttte,"","");
}
while (k<nf) index[k++]=j;
if (nf>=MAXINFILE) {
trace(2,"too many input files. trancated\n");
break;
}
}
if (!reppath(outfile,ofile,tts,"","")&&i>0) flag=0;
/* execute processing session */
stat=execses_b(tts,tte,ti,popt,sopt,fopt,flag,ifile,index,nf,ofile,
rov,base);
if (stat==1) break;
}
for (i=0;i<MAXINFILE;i++) free(ifile[i]);
}
else if (ts.time!=0) { //如果起始时间不为0,结束时间为0或处理单元时间小于0
for (i=0;i<n&&i<MAXINFILE;i++) {
if (!(ifile[i]=(char *)malloc(1024))) {
for (;i>=0;i--) free(ifile[i]);
return -1;
}
reppath(infile[i],ifile[i],ts,"","");
index[i]=i;
}
reppath(outfile,ofile,ts,"","");
/* execute processing session */
stat=execses_b(ts,te,ti,popt,sopt,fopt,1,ifile,index,n,ofile,rov,
base);
for (i=0;i<n&&i<MAXINFILE;i++) free(ifile[i]);
}
else { //如果起始时间为0
for (i=0;i<n;i++) index[i]=i;
/* execute processing session */
stat=execses_b(ts,te,ti,popt,sopt,fopt,1,infile,index,n,outfile,rov,
base);
}
/* close processing session */
closeses(&navs,&pcvss,&pcvsr);
return stat;
}3.2.3 execses_*():流动站和基准站处理
1. 功能
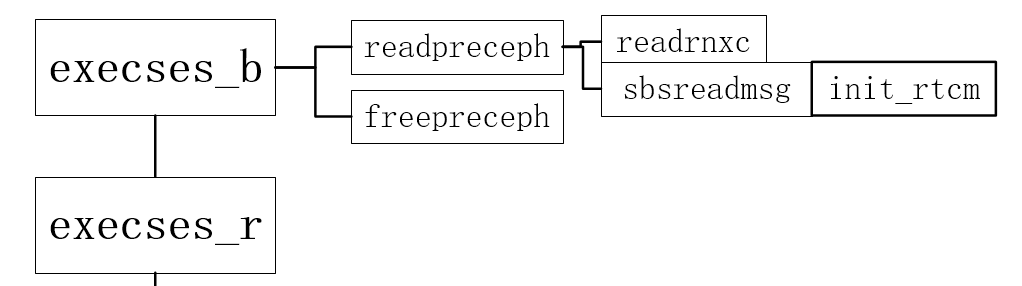
execses_b() 和 execses_r() 函数非常类似,execsec_b()会调用调用readpreceph()读取精密星历和SBAS数据,把传入infile[]文件中基准站替换符进行替换,之后调用execses_r()。execses_r()把传入infile[]文件中流动站站替换符进行替换,再调用execses()
2. 参数列表
/* args */
gtime_t ts I 处理的起始时间,写0表示不限制
gtime_t te I 处理的起始时间,写0表示不限制
double ti I 处理的间隔时间 (s),写0表示不限制,全处理
const prcopt_t *popt I 处理选项结构体
const solopt_t *sopt I 结果选项结构体
const filopt_t *fopt I 文件选项结构体
int flag I 用于控制输出
char **infile I 传入文件路径数组首地址
const int *index I 传入文件路径数组首地址
int n I 传入文件数量
char *outfile I 输出文件的路径,写0表示stdout终端
const char *rov I 流动站ID列表,空格隔开
const char *base I 基准站ID列表,空格隔开- 参数flag:
- 传入execses_r(),再传入execses(),用于控制输出,如果值为0,很多不输出;
- 在postpos函数中赋值传入,替换输出文件替换符出错的时候设为0,其它情况为1
3. 执行流程
- 调用
readpreceph()读取精密星历和 SBAS 数据。 - 遍历
infile[],寻找基准站替换符 %b:- 找不到基准站 ID 的替换符,直接调用
execses_r()进行下一步解算 。 - 找到了
infile[i]含有基准站 ID 的替换符,遍历基准站: - 将基准站 ID 赋值给
proc_base。 - 循环替换
infile[i]里的基准站ID的替换符到ifile[i]。 - 替换
outfile里的基准站ID替换符到ofile。 - 调用
execses_r()进行下一步解算 。
- 找不到基准站 ID 的替换符,直接调用
- 调用
freepreceph(),释放readpreceph()开辟的空间。
4. 注意事项
- readpreceph():遍历infile[],判断,调用readsp3()读取精密星历、调用readrnxc() 读取精密钟差,调用sbsreadmsg()读取sbas文件,将RCTM的路径赋值给rtcm_file,调用init_rtcm()初始化rtcm控制结构体。
5. 源码注释
点击查看代码:execses_b()
static int execses_b(gtime_t ts, gtime_t te, double ti, const prcopt_t *popt,
const solopt_t *sopt, const filopt_t *fopt, int flag,
char **infile, const int *index, int n, char *outfile,
const char *rov, const char *base)
{
gtime_t t0={0};
int i,stat=0;
char *ifile[MAXINFILE],ofile[1024], *base_,*p,*q,s[64];
trace(3,"execses_b: n=%d outfile=%s\n",n,outfile);
/* read prec ephemeris and sbas data */
readpreceph(infile,n,popt,&navs,&sbss); //读取精密星历和SBAS数据
//%b:基准站ID的替换符
for (i=0;i<n;i++) if (strstr(infile[i],"%b")) break;
//如果某个infile[i]含有基准站ID的替换符
if (i<n) { /* include base station keywords */
//为base_开辟空间,将base赋值给base_
if (!(base_=(char *)malloc(strlen(base)+1))) {
freepreceph(&navs,&sbss);
return 0;
}
strcpy(base_,base);
for (i=0;i<n;i++) { //为ifile[]开辟空间
if (!(ifile[i]=(char *)malloc(1024))) {
free(base_); for (;i>=0;i--) free(ifile[i]);
freepreceph(&navs,&sbss);
return 0;
}
}
//遍历base_基准站字符串
for (p=base_;;p=q+1) { /* for each base station */
if ((q=strchr(p,' '))) *q='\0'; //拆出一个基准站
if (*p) {
strcpy(proc_base,p); //把基准站名赋值给proc_base
if (ts.time) time2str(ts,s,0); else *s='\0';
if (checkbrk("reading : %s",s)) {
stat=1;
break;
}
//循环替换infile[i]里的基准站ID的替换符到ifile[i]
for (i=0;i<n;i++) reppath(infile[i],ifile[i],t0,"",p);
//替换outfile里的基准站ID替换符到ofile
reppath(outfile,ofile,t0,"",p);
//调用execses_r()进行下一步解算
stat=execses_r(ts,te,ti,popt,sopt,fopt,flag,ifile,index,n,ofile,rov);
}
if (stat==1||!q) break;
}
free(base_); for (i=0;i<n;i++) free(ifile[i]);
}
else { //infile[i]都没有有基准站ID的替换符,直接调用execses_r()进行下一步解算
stat=execses_r(ts,te,ti,popt,sopt,fopt,flag,infile,index,n,outfile,rov);
}
/* free prec ephemeris and sbas data */
freepreceph(&navs,&sbss);
return stat;
}点击查看代码:execses_r()
static int execses_r(gtime_t ts, gtime_t te, double ti, const prcopt_t *popt,
const solopt_t *sopt, const filopt_t *fopt, int flag,
char **infile, const int *index, int n, char *outfile,
const char *rov)
{
gtime_t t0={0};
int i,stat=0;
char *ifile[MAXINFILE],ofile[1024],*rov_,*p,*q,s[64]="";
trace(3,"execses_r: n=%d outfile=%s\n",n,outfile);
for (i=0;i<n;i++) if (strstr(infile[i],"%r")) break;
//如果某个infile[i]含有基准站ID的替换符
if (i<n) { /* include rover keywords */
if (!(rov_=(char *)malloc(strlen(rov)+1))) return 0;
strcpy(rov_,rov);
for (i=0;i<n;i++) {
if (!(ifile[i]=(char *)malloc(1024))) {
free(rov_); for (;i>=0;i--) free(ifile[i]);
return 0;
}
}
for (p=rov_;;p=q+1) { /* for each rover */
if ((q=strchr(p,' '))) *q='\0';
if (*p) {
strcpy(proc_rov,p);
if (ts.time) time2str(ts,s,0); else *s='\0';
if (checkbrk("reading : %s",s)) {
stat=1;
break;
}
for (i=0;i<n;i++) reppath(infile[i],ifile[i],t0,p,"");
reppath(outfile,ofile,t0,p,"");
/* execute processing session */
stat=execses(ts,te,ti,popt,sopt,fopt,flag,ifile,index,n,ofile);
}
if (stat==1||!q) break;
}
free(rov_); for (i=0;i<n;i++) free(ifile[i]);
}
else {
/* execute processing session */
stat=execses(ts,te,ti,popt,sopt,fopt,flag,infile,index,n,outfile);
}
return stat;
}3.2.4 execses():定位解算处理
1. 功能
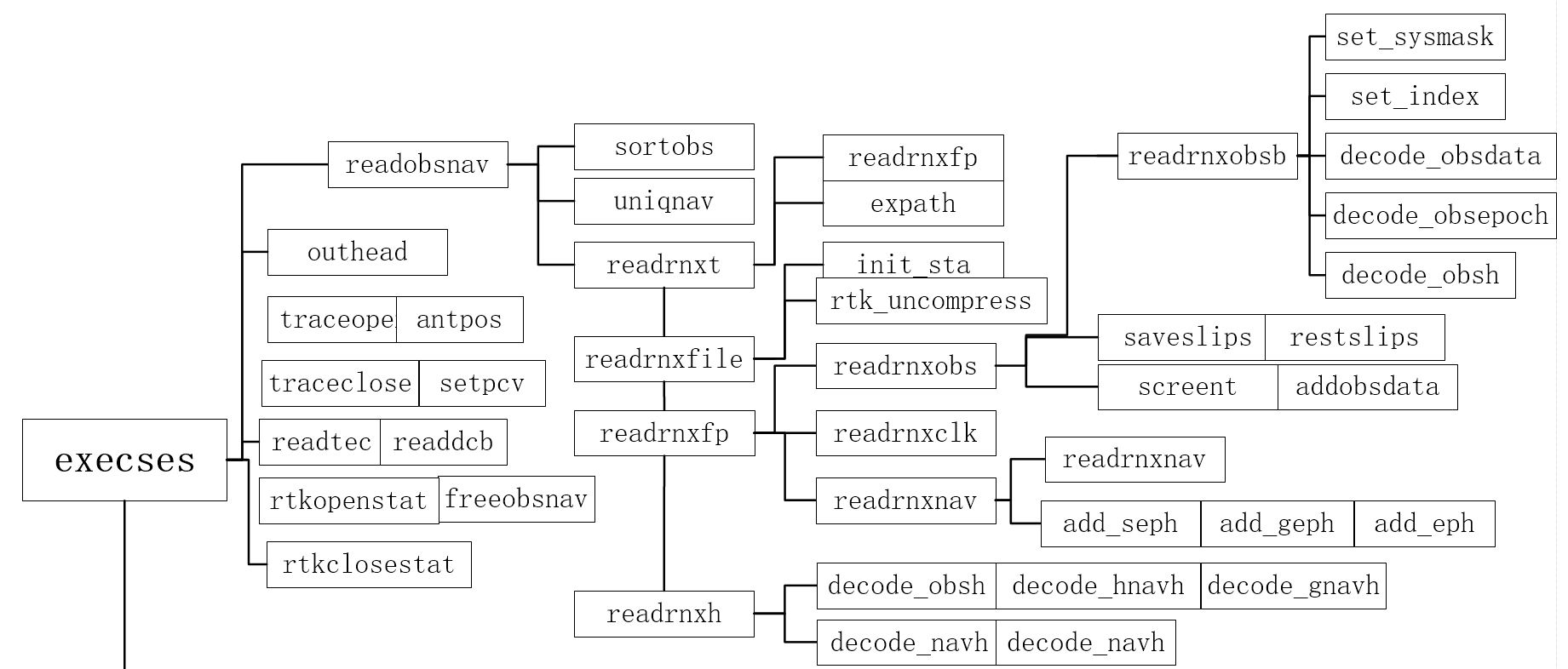
读取各种文件,并将文件中的内容赋值到程序的结构体内,获取基准站的位置,根据滤波方向调用 procpos() 进行下一步解算。.trace文件的生成、文件读取相关trace文件内容的生成,均在 execses() 中 。
2. 输入参数
gtime_t ts I 处理的起始时间,写0表示不限制
gtime_t te I 处理的起始时间,写0表示不限制
double ti I 处理的间隔时间 (s),写0表示不限制,全处理
const prcopt_t *popt I 处理选项结构体
const solopt_t *sopt I 结果选项结构体
const filopt_t *fopt I 文件选项结构体
int flag I 用于控制输出
char **infile I 传入文件路径数组首地址
const int *index I 传入文件路径数组首地址
int n I 传入文件数量
char *outfile I 输出文件的路径,写0表示stdout终端
const char *rov I 流动站ID列表,空格隔开
const char *base I 基准站ID列表,空格隔开3. 执行流程
调用
traceclose()、traceopen()、tracelevel(),先关闭原有trace,打开trace文件,并设置trace等级。调用
readtec(),读取电离层TEC文件,TEC:Total electronic content 总电子含量 。调用
readerp(),读取地球自转参数ERP文件。调用
readobsnav(),读取OBS和NAV文件 。调用
readdcb(),读取差分码偏差DCB参数,一种硬件误差 。调用
setpcv(),读取天线参数,PCV:天线相位中心变化 。调用
readotl(),读取潮汐参数 。FIXED模式,调用
antpos()得到流动站坐标 。DGPS、KINEMA、STATIC模式,调用
antpos()得到基准站坐标 。调用
rtkclosestat()、rtkopenstat(),打开结果统计文件 。调用
outhead(),写输出结果文件的文件头 。结果文件的文件尾在procpos()内调用outsol()输出。判断滤波类型,用不同的方式调用
procpos()进行下一步解算:前向滤波和后向滤波调用procpos函数传参相同,两者区别在于procpos函数内会调用inputobs函数,针对不同的滤波解算类型,inputobs函数内读取文件数据的顺序不同。
revs:0:forward;1:backward
iobsu:当前流动站观测数据下标
iobsr:当前参考站观测数据下标
isbs:当前sbas数据下标- forward 前向滤波:iobsu=iobsr=isbs=revs 0,直接调用
procpos()。 - backward 后向滤波:res=1,iobsu=iobsr=obss.n-1 ,isbs=sbss.n-1 ,再调用
procpos()。 - combined :先算前向滤波的结果,设置revs、iobsu、iobsr、isbs值之后再算后向滤波的结果,最后调用combress()结合。
- forward 前向滤波:iobsu=iobsr=isbs=revs 0,直接调用
调用
freeobsnav()释放obs->data 、nav->eph 、nav->geph 、nav->seph
4. 注意事项
- antpos():得到坐标,参2
rcvno传1得到流动站坐标,传0得到基准站坐标- postype=POSOPT_SINGLE :调用
avepos()利用基准站的观测文件计算其SPP定位结果作为基准站的坐标 。 - postype=POSOPT_FILE :调用
getstapos()从pos文件读取基准站坐标 。 - postype=POSOPT_RINEX :从rinex头文件中获取测站经过相位中心改正的位置数据。头文件中的测站数据经过读取后已存到stas中。
- postype=POSOPT_SINGLE :调用
- avepos():通过nav和多个obs单点定位计算位置,存到ra[]中
- getstapos():从pos文件读取基准站坐标
- outhead():创建输出结果文件,写入文件头
- openfile():以追加的方式打开结果文件,返回文件描述符
- combres():调用smoother()结合前后向滤波的结果
- valcomb():判断前后向滤波合并后结果的有效性( 以内有效)
4. 源码注释
点击查看代码
static int execses(gtime_t ts, gtime_t te, double ti, const prcopt_t *popt,
const solopt_t *sopt, const filopt_t *fopt, int flag,
char **infile, const int *index, int n, char *outfile)
{
FILE *fp;
prcopt_t popt_=*popt;
char tracefile[1024],statfile[1024],path[1024],*ext;
trace(3,"execses : n=%d outfile=%s\n",n,outfile);
/* open debug trace */ //打开trace文件,并设置trace等级
if (flag&&sopt->trace>0) {
if (*outfile) {
strcpy(tracefile,outfile);
strcat(tracefile,".trace");
}
else {
strcpy(tracefile,fopt->trace);
}
traceclose();
traceopen(tracefile);
tracelevel(sopt->trace);
}
/* read ionosphere data file */ //读取电离层TEC文件
if (*fopt->iono&&(ext=strrchr(fopt->iono,'.'))) {
if (strlen(ext)==4&&(ext[3]=='i'||ext[3]=='I')) {
reppath(fopt->iono,path,ts,"","");
readtec(path,&navs,1); //TEC:Total electronic content 总电子含量
}
}
/* read erp data */ //读取地球自转参数ERP文件
if (*fopt->eop) {
free(navs.erp.data); navs.erp.data=NULL; navs.erp.n=navs.erp.nmax=0;
reppath(fopt->eop,path,ts,"","");
if (!readerp(path,&navs.erp)) {
showmsg("error : no erp data %s",path);
trace(2,"no erp data %s\n",path);
}
}
/* read obs and nav data */ //读取OBS和NAV文件
if (!readobsnav(ts,te,ti,infile,index,n,&popt_,&obss,&navs,stas)) return 0;
/* read dcb parameters */ //读取差分码偏差DCB参数,一种硬件误差
if (*fopt->dcb) {
reppath(fopt->dcb,path,ts,"","");
readdcb(path,&navs,stas);
}
/* set antenna paramters */ //读取天线参数,PCV:天线相位中心变化
if (popt_.mode!=PMODE_SINGLE) {
setpcv(obss.n>0?obss.data[0].time:timeget(),&popt_,&navs,&pcvss,&pcvsr,
stas);
}
/* read ocean tide loading parameters */ //读取潮汐参数
if (popt_.mode>PMODE_SINGLE&&*fopt->blq) {
readotl(&popt_,fopt->blq,stas);
}
/* rover/reference fixed position */ //FIXED模式,调用antpos()得到流动站坐标
if (popt_.mode==PMODE_FIXED) {
if (!antpos(&popt_,1,&obss,&navs,stas,fopt->stapos)) {
freeobsnav(&obss,&navs);
return 0;
}
}
else if (PMODE_DGPS<=popt_.mode&&popt_.mode<=PMODE_STATIC) { //DGPS、KINEMA、STATIC模式,调用antpos()得到基准站坐标
if (!antpos(&popt_,2,&obss,&navs,stas,fopt->stapos)) {
freeobsnav(&obss,&navs);
return 0;
}
}
/* open solution statistics */ //打开结果统计文件
if (flag&&sopt->sstat>0) {
strcpy(statfile,outfile);
strcat(statfile,".stat");
rtkclosestat();
rtkopenstat(statfile,sopt->sstat);
}
/* write header to output file */ //写输出结果文件的文件头
if (flag&&!outhead(outfile,infile,n,&popt_,sopt)) {
freeobsnav(&obss,&navs);
return 0;
}
iobsu=iobsr=isbs=revs=aborts=0;
if (popt_.mode==PMODE_SINGLE||popt_.soltype==0) {
if ((fp=openfile(outfile))) {
procpos(fp,&popt_,sopt,0); /* forward */ //前向滤波
fclose(fp);
}
}
else if (popt_.soltype==1) {
if ((fp=openfile(outfile))) {
revs=1; iobsu=iobsr=obss.n-1; isbs=sbss.n-1;
procpos(fp,&popt_,sopt,0); /* backward */ //后向滤波
fclose(fp);
}
}
else { /* combined */
//开辟内存空间
solf=(sol_t *)malloc(sizeof(sol_t)*nepoch); //前向结果
solb=(sol_t *)malloc(sizeof(sol_t)*nepoch); //后向结果
rbf=(double *)malloc(sizeof(double)*nepoch*3); //前向基准站坐标
rbb=(double *)malloc(sizeof(double)*nepoch*3); //后向基准站坐标
if (solf&&solb) { //判断内存开辟成功
isolf=isolb=0;
procpos(NULL,&popt_,sopt,1); /* forward */ //前向滤波
revs=1; iobsu=iobsr=obss.n-1; isbs=sbss.n-1;
procpos(NULL,&popt_,sopt,1); /* backward */ //后向滤波
//虽然前向滤波和后向滤波调用procpos函数的源代码相同(如下所示),
//但是两者最主要的一个区别就是由于procpos函数内会调用inputobs函数,
//然而针对不同的滤波解算类型,inputobs函数内读取文件数据的顺序不同
/* combine forward/backward solutions */
if (!aborts&&(fp=openfile(outfile))) {
combres(fp,&popt_,sopt);
fclose(fp);
}
}
else showmsg("error : memory allocation");
free(solf);
free(solb);
free(rbf);
free(rbb);
}
/* free obs and nav data */
freeobsnav(&obss,&navs);
return aborts?1:0;
}3.2.4 procpos():定位算法处理

1. 功能
从这个函数开始正式整个流动站和基准站逐历元处理。每次循环都通过 inputobs 函数读取一个历元的数据,并调用 rtkpos 函数对该历元的数据进行解算。
2. 参数列表
FILE *fp I/O 输出结果文件指针
const prcopt_t *popt I 处理选项结构体
const solopt_t *sopt I 结果选项结构体
const filopt_t *fopt I 文件选项结构体
int mode I 0:forward/backward、1:combined3. 执行流程
- 判断结果是否为静态,处理选项和结果选项都为静态才算静态;
- 调用
rtkinit()初始化rtk_t,将 popt 结构体赋值给 rtk 的部分成员 ; - while 大循环,调用
inputobs(),每次取一个历元的观测数据obs[]; - 排除禁用卫星的观测值;
- PPP 中如果需要,调用
corr_phase_bias_ssr()相位的小数偏差改正(不完善); - 调用
rtkpos()对当前历元进行解算 - 根据模式,输出结果,记录当前历元时间
4. 注意事项
- inputobs():取一个历元基准站、流动站的观测数据到OBS数组中;如果需要,调用sbsupdatecorr()、update_rtcm_ssr()进行改正。
- nextobsf():在obs中正向指定接收机查找下一个历元观测数据的下标 ,下标从 i 开始,连续 n 个,之间卫星不同。
- nextobsb():在obs反向查找指定接收机下一个历元观测数据的下标
- rtkinit():初始化rtk_t结构体
5. 源码注释
点击查看代码
static void procpos(FILE *fp, const prcopt_t *popt, const solopt_t *sopt,
int mode)
{
gtime_t time={0};
sol_t sol={{0}};
rtk_t rtk;
obsd_t obs[MAXOBS*2]; /* for rover and base */
double rb[3]={0};
int i,
nobs,
n,
solstatic,
pri[]={6,1,2,3,4,5,1,6};
trace(3,"procpos : mode=%d\n",mode);
solstatic=sopt->solstatic&& //先判断结果是否为静态,处理选项和结果选项都为静态才算静态
(popt->mode==PMODE_STATIC||popt->mode==PMODE_PPP_STATIC);
rtkinit(&rtk,popt); //初始化rtk_t,主要将popt结构体赋值给rtk的部分成员
rtcm_path[0]='\0';
//对每一个历元进行遍历求解和输出
//获取当前历元观测值数nobs以及当前历元各观测记录obs[MAXOBS*2]
while ((nobs=inputobs(obs,rtk.sol.stat,popt))>=0) {
/* exclude satellites */
for (i=n=0;i<nobs;i++) {
//satsys:传入satellite number,返回卫星系统(SYS_GPS,SYS_GLO,...) ,通过传入的指针prn传出PRN码。
if ((satsys(obs[i].sat,NULL)&popt->navsys)&&
popt->exsats[obs[i].sat-1]!=1) obs[n++]=obs[i]; //排除禁用卫星的观测值
}
if (n<=0) continue;
//如果ppp模式设置了fractional cycle bias相位的小数轴偏差
/* carrier-phase bias correction */
if (!strstr(popt->pppopt,"-ENA_FCB")) {
corr_phase_bias_ssr(obs,n,&navs);
}
//调用rtkpos()进行解算
if (!rtkpos(&rtk,obs,n,&navs)) continue;
//单forward/backward模式
if (mode==0) { /* forward/backward */
if (!solstatic) { //不是静态模式就直接输出结果
outsol(fp,&rtk.sol,rtk.rb,sopt);
}
else if (time.time==0||pri[rtk.sol.stat]<=pri[sol.stat]) {
sol=rtk.sol;
for (i=0;i<3;i++) rb[i]=rtk.rb[i];
if (time.time==0||timediff(rtk.sol.time,time)<0.0) {
time=rtk.sol.time; //记录上一历元的时间
}
}
}
else if (!revs) { /* combined-forward */
if (isolf>=nepoch) return;
solf[isolf]=rtk.sol;
for (i=0;i<3;i++) rbf[i+isolf*3]=rtk.rb[i];
isolf++;
}
else { /* combined-backward */
if (isolb>=nepoch) return;
solb[isolb]=rtk.sol;
for (i=0;i<3;i++) rbb[i+isolb*3]=rtk.rb[i];
isolb++;
}
}
if (mode==0&&solstatic&&time.time!=0.0) {
sol.time=time;
outsol(fp,&sol,rb,sopt);
}
rtkfree(&rtk);
}