
10. 精密单点定位
在 PPP 模式下,RTKLIB 同样采用与附录 E.7 中描述的方案类似的扩展卡尔曼滤波(EKF)。与相对定位不同的是,PPP 采用了类似于单点定位模型的非差(ZD)观测方程,而不是双差(DD)观测方程。更多有关 PPP 的原理部分请参考 RTKLIB-Manual-CN 附录 E.8 精密单点定位。
10.1 pppos():精密单点定位主入口函数
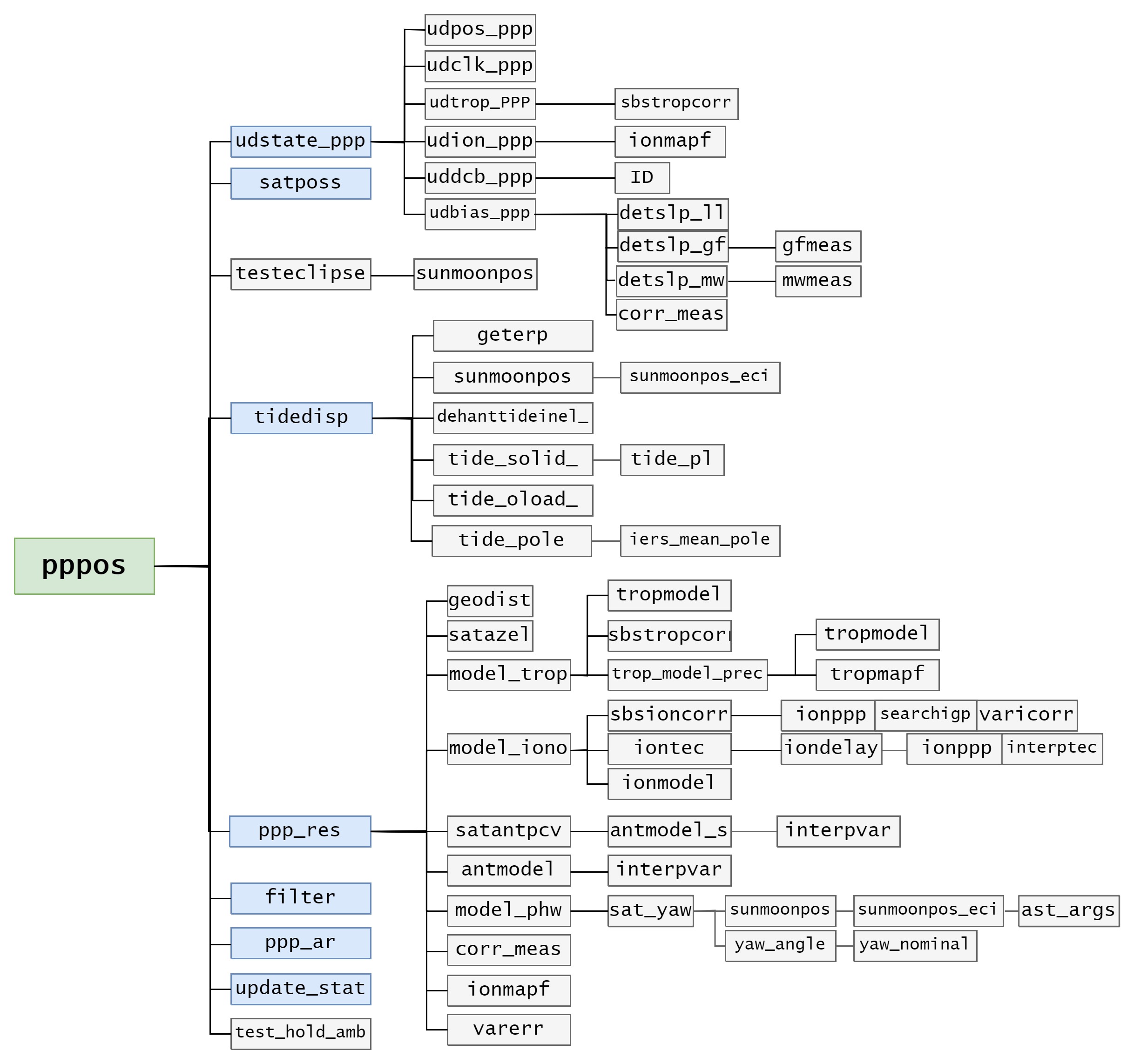
图12-1 pppos() 函数调用流程图[1]
10.1.1 pppos():函数主体
1. 参数列表
c
/* args */
rtk_t *rtk IO rtk控制结构体
obsd_t *obs I OBS观测数据
int n I OBS观测数据的数量
nav_t *nav I 导航数据
/* return */
none2. 执行流程
- 遍历所有卫星、所有频率,结果
rtk->ssat[i].fix[j]赋值0 - 时间更新:调用
udstate_ppp(),更新状态值rtk->x及其误差协方差rtk->P - 调用
satposs(),计算卫星位置rs、卫星钟差dts - 调用
testeclipse(),排除需要排除的卫星 - 调用
tidedisp(),计算海洋潮汐以及极潮对接收机位置产生的影响 - 滤波迭代、默认次数(8次)
- 调用
matcpy(),复制rtk->x到xp,rtk->P到Pp - 调用
ppp_res(),计算残差V,设计矩阵H - 调用
filter(),kalman滤波量测更新解算出xp、Pp - 解算后,进行后验残差估计,符合限制则输出为精密单点定位状态,将解算结果
xp、Pp赋值到rtk->x、rtk->P,break迭代
- 调用
- 如果迭代次数超过设置次数,输出“迭代溢出”
- 如果解的状态是
SOLQ_PPP- 调用
ppp_ar()进行模糊度固定,ppp_res()进行后验残差估计 - 检验通过,将解算结果
xp、Pp赋值到rtk->xa、rtk->Pa,计算三个未知参数的方差,方差向量的模如果<MAX_STD_FIX,解的状态设为固定解SOLQ_FIX - 检验不通过,
rtk->nfix值设置为0 - 调用
update_stat(),更新solution状态
- 调用
3. 源码注释
点击查看代码
c
extern void pppos(rtk_t *rtk, const obsd_t *obs, int n, const nav_t *nav)
{
const prcopt_t *opt=&rtk->opt;
double *rs,*dts,*var,*v,*H,*R,*azel,*xp,*Pp,dr[3]={0},std[3];
char str[32];
int i,j,nv,info,svh[MAXOBS],exc[MAXOBS]={0},stat=SOLQ_SINGLE;
time2str(obs[0].time,str,2);
trace(3,"pppos : time=%s nx=%d n=%d\n",str,rtk->nx,n);
rs=mat(6,n); dts=mat(2,n); var=mat(1,n); azel=zeros(2,n);
// 遍历所有卫星、所有频率,rtk->ssat[i].fix[j]赋值0
for (i=0;i<MAXSAT;i++) for (j=0;j<opt->nf;j++) rtk->ssat[i].fix[j]=0;
// 卡尔曼滤波的时间更新,分为位置参数更新,钟差参数更新,对流层、电离层。相位偏差的时间参数更新
// 更新状态值 rtk->x 及其误差协方差 rtk->P
/* temporal update of ekf states */
udstate_ppp(rtk,obs,n,nav);
/* satellite positions and clocks */ // 计算卫星位置rs、卫星钟差dts
satposs(obs[0].time,obs,n,nav,rtk->opt.sateph,rs,dts,var,svh);
/* exclude measurements of eclipsing satellite (block IIA) */
if (rtk->opt.posopt[3]) { // 调用 testeclipse 进行排除需要排除的卫星
testeclipse(obs,n,nav,rs);
}
/* earth tides correction */ // 计算海洋潮汐以及极潮对接收机位置产生的影响
if (opt->tidecorr) {
tidedisp(gpst2utc(obs[0].time),rtk->x,opt->tidecorr==1?1:7,&nav->erp,
opt->odisp[0],dr);
}
nv=n*rtk->opt.nf*2+MAXSAT+3;
xp=mat(rtk->nx,1);
Pp=zeros(rtk->nx,rtk->nx);
v=mat(nv,1); // 残差 v
H=mat(rtk->nx,nv); // 设计矩阵 H
R=mat(nv,nv); // 测量误差的协方差 R
// 滤波迭代、默认次数(8次)
for (i=0;i<MAX_ITER;i++) {
matcpy(xp,rtk->x,rtk->nx,1);
matcpy(Pp,rtk->P,rtk->nx,rtk->nx);
/* prefit residuals */
if (!(nv=ppp_res(0,obs,n,rs,dts,var,svh,dr,exc,nav,xp,rtk,v,H,R,azel))) {
trace(2,"%s ppp (%d) no valid obs data\n",str,i+1);
break;
}
/* measurement update of ekf states */
if ((info=filter(xp,Pp,H,v,R,rtk->nx,nv))) { // 扩展卡尔曼滤波量测更新,
// filter用于EKF状态的量测更新,先验状态和后验状态信息的更新
// filter_进行EKF,量测更新部分的解算
trace(2,"%s ppp (%d) filter error info=%d\n",str,i+1,info);
break;
}
/* postfit residuals */ // 解算后,进行后验残差估计,符合限制则输出为精密单点定位状态
if (ppp_res(i+1,obs,n,rs,dts,var,svh,dr,exc,nav,xp,rtk,v,H,R,azel)) {
matcpy(rtk->x,xp,rtk->nx,1);
matcpy(rtk->P,Pp,rtk->nx,rtk->nx);
stat=SOLQ_PPP;
break;
}
}
if (i>=MAX_ITER) {
trace(2,"%s ppp (%d) iteration overflows\n",str,i);
}
if (stat==SOLQ_PPP) {
/* ambiguity resolution in ppp */ // 模糊度固定,RTKLIB中的ppp_ar没实现直接return 0
if (ppp_ar(rtk,obs,n,exc,nav,azel,xp,Pp)&&
ppp_res(9,obs,n,rs,dts,var,svh,dr,exc,nav,xp,rtk,v,H,R,azel)) { //ppp_res计算残差
matcpy(rtk->xa,xp,rtk->nx,1);
matcpy(rtk->Pa,Pp,rtk->nx,rtk->nx);
for (i=0;i<3;i++) std[i]=sqrt(Pp[i+i*rtk->nx]);
if (norm(std,3)<MAX_STD_FIX) stat=SOLQ_FIX;
}
else {
rtk->nfix=0;
}
/* update solution status */
update_stat(rtk,obs,n,stat); // 更新solution状态
/* hold fixed ambiguities */
if (stat==SOLQ_FIX&&test_hold_amb(rtk)) {
matcpy(rtk->x,xp,rtk->nx,1);
matcpy(rtk->P,Pp,rtk->nx,rtk->nx);
trace(2,"%s hold ambiguity\n",str);
rtk->nfix=0;
}
}
free(rs); free(dts); free(var); free(azel);
free(xp); free(Pp); free(v); free(H); free(R);
}10.2 udstate_ppp():Kalman滤波时间更新
10.2.1 udstate_ppp():函数主体
1. 参数列表
c
/* args */
rtk_t *rtk IO rtk 控制结构体
obsd_t *obs I obs 观测数据
int n I obs 观测数据的数量
nav_t *nav I 导航数据
/* return*/
none2. 执行流程
- 调用
udpos_ppp(),位置参数更新 - 调用
udclk_ppp(),钟差参数更新 - 如果在配置中选择的对流层模型为ZTD estimation或者ZTD+grad estimation,调用
udtrop_ppp(),对流层参数更新 - 如果在配置中选择电离层模型为estimation,调用
udiono_ppp(),电离层参数更新 - 如果选择的频率数>=3,调用
uddcb_ppp(),L5接收机硬件延迟参数更新 - 调用
udbias_ppp(),整周模糊度参数更新
3. 源码注释
点击查看代码
c
static void udstate_ppp(rtk_t *rtk, const obsd_t *obs, int n, const nav_t *nav)
{
trace(3,"udstate_ppp: n=%d\n",n);
/* temporal update of position */ // 调用 udpos_ppp 根据不同模式初始化状态 rtk->x 中的位置值
udpos_ppp(rtk); // 位置参数更新
/* temporal update of clock */ // 调用 udclk_ppp 初始化状态 rtk->x 中的钟差值(6个,因有6个系统)
udclk_ppp(rtk); // 钟差参数更新
/* temporal update of tropospheric parameters */
if (rtk->opt.tropopt==TROPOPT_EST||rtk->opt.tropopt==TROPOPT_ESTG) {
udtrop_ppp(rtk); // 对流层参数更新
}
/* temporal update of ionospheric parameters */
if (rtk->opt.ionoopt==IONOOPT_EST) {
udiono_ppp(rtk,obs,n,nav); // 电离层参数更新
}
/* temporal update of L5-receiver-dcb parameters */
if (rtk->opt.nf>=3) {
uddcb_ppp(rtk); // 更新L5接收机硬件延迟参数
}
/* temporal update of phase-bias */ // 调用 udbias_ppp 更新载波相位偏移状态值以及其误差协方差。
udbias_ppp(rtk,obs,n,nav); // 整周模糊度更新
}10.2.2 udpos_ppp():位置参数更新
1. 参数列表
c
/* args */
rtk_t *rtk IO rtk 控制结构体
/* return*/
none2. 执行流程:
- 如果是PPP固定解模式
PMODE_PPP_FIXED,直接用已知点的固定坐标初始化 - 如果是首历元,赋值单点定位的解
rtk->sol.rr、VAR_POS,动力学模式,还要赋值速度、加速度 - 如果是PPP静态
PMODE_PPP_STATIC模式,状态量不变,只给P矩阵加过程噪声 - 如果
PMODE_PPP_KINEMA但非dynamics模式,用单点定位解rtk->sol.rr[i]和VAR_POS赋值 - 动力学模式动态PPP,构建状态转移矩阵
F,进行状态转移 - 为
Q矩阵加速度部分加过程噪声
3. 源码注释
点击查看代码
c
static void udpos_ppp(rtk_t *rtk)
{
double *F,*P,*FP,*x,*xp,pos[3],Q[9]={0},Qv[9];
int i,j,*ix,nx;
trace(3,"udpos_ppp:\n");
// 如果是PPP固定解模式,直接用已知点的固定坐标初始化
/* fixed mode */
if (rtk->opt.mode==PMODE_PPP_FIXED) {
for (i=0;i<3;i++) initx(rtk,rtk->opt.ru[i],1E-8,i);
return;
}
// 如果是首历元,赋值单点定位的解
/* initialize position for first epoch */
if (norm(rtk->x,3)<=0.0) {
for (i=0;i<3;i++) initx(rtk,rtk->sol.rr[i],VAR_POS,i);
if (rtk->opt.dynamics) { // 动力学模式,赋值速度、加速度
for (i=3;i<6;i++) initx(rtk,rtk->sol.rr[i],VAR_VEL,i);
for (i=6;i<9;i++) initx(rtk,1E-6,VAR_ACC,i);
}
}
// 如果是PMODE_PPP_STATIC 模式,状态量不变,只给P矩阵加过程噪声
/* static ppp mode */
if (rtk->opt.mode==PMODE_PPP_STATIC) {
for (i=0;i<3;i++) {
rtk->P[i*(1+rtk->nx)]+=SQR(rtk->opt.prn[5])*fabs(rtk->tt);
}
return;
}
// 如果PMODE_PPP_KINEMA但非dynamics模式,用单点定位解rtk->sol.rr[i]和VAR_POS赋值
/* kinmatic mode without dynamics */
if (!rtk->opt.dynamics) {
for (i=0;i<3;i++) {
initx(rtk,rtk->sol.rr[i],VAR_POS,i);
}
return;
}
// 动力学模式动态 PPP,构建状态转移矩阵 F
/* generate valid state index */
ix=imat(rtk->nx,1);
for (i=nx=0;i<rtk->nx;i++) {
if (rtk->x[i]!=0.0&&rtk->P[i+i*rtk->nx]>0.0) ix[nx++]=i;
}
if (nx<9) { // 参数需要大于 9 个
free(ix);
return;
}
// 状态转移矩阵构建
/* state transition of position/velocity/acceleration */
F=eye(nx); P=mat(nx,nx); FP=mat(nx,nx); x=mat(nx,1); xp=mat(nx,1);
for (i=0;i<6;i++) {
F[i+(i+3)*nx]=rtk->tt;
}
for (i=0;i<3;i++) {
F[i+(i+6)*nx]=SQR(rtk->tt)/2.0;
}
for (i=0;i<nx;i++) {
x[i]=rtk->x[ix[i]];
for (j=0;j<nx;j++) {
P[i+j*nx]=rtk->P[ix[i]+ix[j]*rtk->nx];
}
}
// 状态转移
/* x=F*x, P=F*P*F+Q */
matmul("NN",nx,1,nx,1.0,F,x,0.0,xp);
matmul("NN",nx,nx,nx,1.0,F,P,0.0,FP);
matmul("NT",nx,nx,nx,1.0,FP,F,0.0,P);
for (i=0;i<nx;i++) {
rtk->x[ix[i]]=xp[i];
for (j=0;j<nx;j++) {
rtk->P[ix[i]+ix[j]*rtk->nx]=P[i+j*nx];
}
}
// 为 Q 矩阵加速度部分加过程噪声
/* process noise added to only acceleration */
Q[0]=Q[4]=SQR(rtk->opt.prn[3])*fabs(rtk->tt);
Q[8]=SQR(rtk->opt.prn[4])*fabs(rtk->tt);
ecef2pos(rtk->x,pos); //XYZ->BLH
covecef(pos,Q,Qv);
for (i=0;i<3;i++) for (j=0;j<3;j++) {
rtk->P[i+6+(j+6)*rtk->nx]+=Qv[i+j*3];
}
free(ix); free(F); free(P); free(FP); free(x); free(xp);
}10.2.3 udclk_ppp():钟差参数更新
1. 参数列表
c
/* args */
rtk_t *rtk IO rtk 控制结构体
/* return*/
none2. 执行流程
- 检测是否为精密星历
EPHOPT_PREC,认为精密钟差是白噪声,每个历元初始化,精密星历的时间是基于 GPS 时间,忽略系统间的偏差 - 不是精密星历则利用前一秒的结果,并考虑系统间时差信息
3. 源码注释
点击查看代码
c
static void udclk_ppp(rtk_t *rtk)
{
double dtr;
int i;
trace(3,"udclk_ppp:\n");
// 认为钟差是白噪声,每个历元初始化
/* initialize every epoch for clock (white noise) */
for (i=0;i<NSYS;i++) {
// 检测是否为精密星历EPHOPT_PREC,精密星历的时间是基于gps时间,忽略系统间的偏差
if (rtk->opt.sateph==EPHOPT_PREC) { // 精密星历
/* time of prec ephemeris is based gpst */
/* negelect receiver inter-system bias */
dtr=rtk->sol.dtr[0];
}
// 不是精密星历则利用前一秒的结果,并考虑系统间时差信息
else {
dtr=i==0?rtk->sol.dtr[0]:rtk->sol.dtr[0]+rtk->sol.dtr[i];
}
initx(rtk,CLIGHT*dtr,VAR_CLK,IC(i,&rtk->opt));
}
}10.2.4 udtrop_ppp():对流层参数更新
在PPP算法中对对流层参数(主要为湿延迟ZTD,湿延迟梯度可选)进行时间更新,包括状态向量初始化和协方差矩阵更新。
1. 参数列表
c
/* args */
rtk_t *rtk IO rtk 控制结构体
/* return*/
none2. 执行流程
- 初始化: 当对流层参数未初始化时,基于位置和时间计算初始ZTD,并可选初始化梯度参数。
- 时间更新: 对于已初始化的参数,增加协方差矩阵的对角元素,模拟对流层参数随时间变化的随机游走过程。
- 选项依赖: rtk->opt.tropopt 控制对流层建模级别:
- TROPOPT_EST: 仅估计ZTD。
- TROPOPT_ESTG: 估计ZTD和梯度。
3. 源码注释
点击查看代码
c
/* temporal update of tropospheric parameters --------------------------------*/
static void udtrop_ppp(rtk_t *rtk)
{
double pos[3], azel[]={0.0,PI/2.0}, ztd, var; // pos: 接收机位置(ECEF坐标),azel: 方位角和高度角(zenith方向),ztd: 对流层湿延迟,var: 湿延迟方差
int i = IT(&rtk->opt), j; // i: 对流层状态向量的起始索引(由选项确定),j: 循环变量
trace(3, "udtrop_ppp:\n"); // 输出调试信息,级别为3,表示进入对流层参数更新函数
if (rtk->x[i] == 0.0) { // 如果对流层状态向量值为0,表明尚未初始化
ecef2pos(rtk->sol.rr, pos); // 将ECEF坐标(rtk->sol.rr)转换为地理坐标(经纬度高度)存储到pos
ztd = sbstropcorr(rtk->sol.time, pos, azel, &var); // 根据当前时间和位置计算初始ZTD及方差,azel为zenith方向
initx(rtk, ztd, var, i); // 初始化状态向量rtk->x[i]为ztd,协方差rtk->P[i+i*rtk->nx]为var
if (rtk->opt.tropopt >= TROPOPT_ESTG) { // 如果选项tropopt>=TROPOPT_ESTG,估计对流层梯度
for (j = i + 1; j < i + 3; j++) // 循环初始化两个梯度参数(通常为南北和东西向)
initx(rtk, 1E-6, VAR_GRA, j); // 初始化状态为1E-6(小值),方差为VAR_GRA(预定义常数)
}
}
else { // 如果已初始化,进行时间更新
rtk->P[i + i * rtk->nx] += SQR(rtk->opt.prn[2]) * fabs(rtk->tt); // 更新ZTD协方差,增加时间相关的方差项,prn[2]为噪声标准差,tt为时间间隔
if (rtk->opt.tropopt >= TROPOPT_ESTG) { // 如果估计梯度参数
for (j = i + 1; j < i + 3; j++) // 循环更新两个梯度参数的协方差
rtk->P[j + j * rtk->nx] += SQR(rtk->opt.prn[2] * 0.1) * fabs(rtk->tt); // 梯度噪声较ZTD小(乘0.1),反映变化较缓
}
}
}10.2.5 udiono_ppp():电离层参数更新
在PPP算法中对电离层延迟参数进行时间更新,包括初始化电离层延迟估计和协方差矩阵更新。
1. 参数列表
c
rtk_t *rtk IO rtk 控制结构体
obsd_t *obs I obs 观测数据
int n I obs 观测数据的数量
nav_t *nav I 导航数据
/* return*/
none2. 执行流程
- 初始化: 使用双频伪距差分估计初始电离层延迟,基于映射函数校正。
- 时间更新: 增加协方差矩阵的对角元素,模拟电离层延迟随时间的不确定性增长。
- 中断处理: 若观测中断超限(gap_resion),重置电离层状态。
3. 源码注释
点击查看代码
c
/* temporal update of ionospheric parameters ---------------------------------*/
static void udiono_ppp(rtk_t *rtk, const obsd_t *obs, int n, const nav_t *nav)
{
double freq1, freq2, ion, sinel, pos[3], *azel; // freq1, freq2: 卫星的两个频点频率(通常L1和L2),ion: 电离层延迟估计值,sinel: 高度角正弦值,pos: 接收机位置,azel: 卫星方位角和高度角
char *p; // 字符串指针,用于解析选项
int i, j, f2, gap_resion = GAP_RESION, sat; // i, j: 循环变量和电离层状态索引,f2: 第二频点索引,gap_resion: 电离层估计重置间隔阈值,sat: 卫星编号
trace(3, "udiono_ppp:\n"); // 输出调试信息,级别为3,表示进入电离层参数更新函数
if ((p = strstr(rtk->opt.pppopt, "-GAP_RESION="))) { // 检查选项字符串中是否包含-GAP_RESION=,允许自定义中断阈值
sscanf(p, "-GAP_RESION=%d", &gap_resion); // 从选项中解析新的gap_resion值
}
/* reset ionosphere delay estimate if outage too long */
for (i = 0; i < MAXSAT; i++) { // 遍历所有卫星(MAXSAT通常为255)
j = II(i + 1, &rtk->opt); // 获取第i+1卫星的电离层状态索引
if (rtk->x[j] != 0.0 && (int)rtk->ssat[i].outc[0] > gap_resion) { // 若状态非零且中断计数超过阈值
rtk->x[j] = 0.0; // 重置电离层状态为0,准备重新初始化
}
}
for (i = 0; i < n; i++) { // 遍历当前历元的所有观测数据
sat = obs[i].sat; // 获取当前卫星编号
j = II(sat, &rtk->opt); // 获取该卫星的电离层状态索引
if (rtk->x[j] == 0.0) { // 若电离层状态为0,表明尚未初始化
f2 = seliflc(rtk->opt.nf, satsys(sat, NULL)); // 选择第二频点索引,基于系统和频点数
freq1 = sat2freq(sat, obs[i].code[0], nav); // 获取第一频点(通常L1)频率
freq2 = sat2freq(sat, obs[i].code[f2], nav); // 获取第二频点(通常L2)频率
if (obs[i].P[0] == 0.0 || obs[i].P[f2] == 0.0 || freq1 == 0.0 || freq2 == 0.0) { // 若伪距或频率无效
continue; // 跳过当前卫星
}
ion = (obs[i].P[0] - obs[i].P[f2]) / (SQR(FREQL1 / freq1) - SQR(FREQL1 / freq2)); // 使用伪距差分估计初始电离层延迟
ecef2pos(rtk->sol.rr, pos); // 将ECEF坐标转换为地理坐标
azel = rtk->ssat[sat - 1].azel; // 获取卫星的方位角和高度角
ion /= ionmapf(pos, azel); // 根据路径长度(映射函数)调整电离层延迟
initx(rtk, ion, VAR_IONO, j); // 初始化状态向量rtk->x[j]为ion,协方差为VAR_IONO
trace(4, "ion init: sat=%d ion=%.4f\n", sat, ion); // 记录初始化值,级别为4
}
else { // 若已初始化,进行时间更新
sinel = sin(MAX(rtk->ssat[sat - 1].azel[1], 5.0 * D2R)); // 计算高度角正弦值,最小5°避免奇异
rtk->P[j + j * rtk->nx] += SQR(rtk->opt.prn[1] / sinel) * fabs(rtk->tt); // 更新协方差,噪声随高度角和时间间隔调整
}
}
}10.2.6 udbias_ppp():整周模糊度参数更新
1. 参数列表
c
/* args */
rtk_t *rtk IO rtk 控制结构体
const obsd_t *obs I 当前历元观测值
int n I 当前移动站观测值数目
const nav_t *nav I 星历
/* return*/
none2. 执行流程
- 日界线检测
- 周跳检测:清除卫星周跳标志位
rtk->ssat[i].slip,调用detslp_ll(),通过LLI检测周跳,调用detslp_gf(),通过几何无关组合检测周跳,调用detslp_mw(),MW组合检测周跳 - 遍历各个频点:
- 遍历各个卫星,判断是否需要重置单差相位偏移状态量,如果检测到相位中断大于门限,或
ARMODE_INST单历元模糊度固定模式,或检测到时钟跳变,则重新赋值模糊度参数。 - 遍历各个卫星,对每一组观测数据,调用
corrmeas(),进行天线相位中心修正,相位缠绕修正,卫星硬件延迟修正 bias赋赋值0;消电离层模式,不用再考虑电离层延迟,直接计算bias[i]=Lc-Pc,否则先通过双频伪距计算电离层延迟ion=(obs[i].P[0]-obs[i].P[f])/(1.0-SQR(freq1/freq2));,利用修正后的电离层延迟计算bias[i]=L[f]-P[f]+2.0*ion*SQR(freq1/freq2);- 检测值是否有效,是否周跳,如果正常,统计初始模糊度和状态量之间的整体偏差
offset - 判断如果满足补偿门限,若载波和伪距跳变太大,为了保持一致性,需要进行校正,在原有的载波相位偏差状态量上加上
offset的平均值,以此来作为载波相位偏差的时间更新 - 遍历各个卫星,给
P矩阵加过程噪声 - 如果状态量无效,或有周跳发生,则用偏移值
bias重置rtk->x,重置模糊度固定标志位rtk->ambc[sat-1].flags[k]=0
3. 源码注释
点击查看代码
c
10.3 PPP-AR
ppp_ar.c 的内容在最新版的 RTKLIB 被删除了,不过 2.4.2 版本包含了 ppp_ar.c 的内容。
LAMBDA 算法相关的函数已在第 12 章已有描述,这里不再赘述。
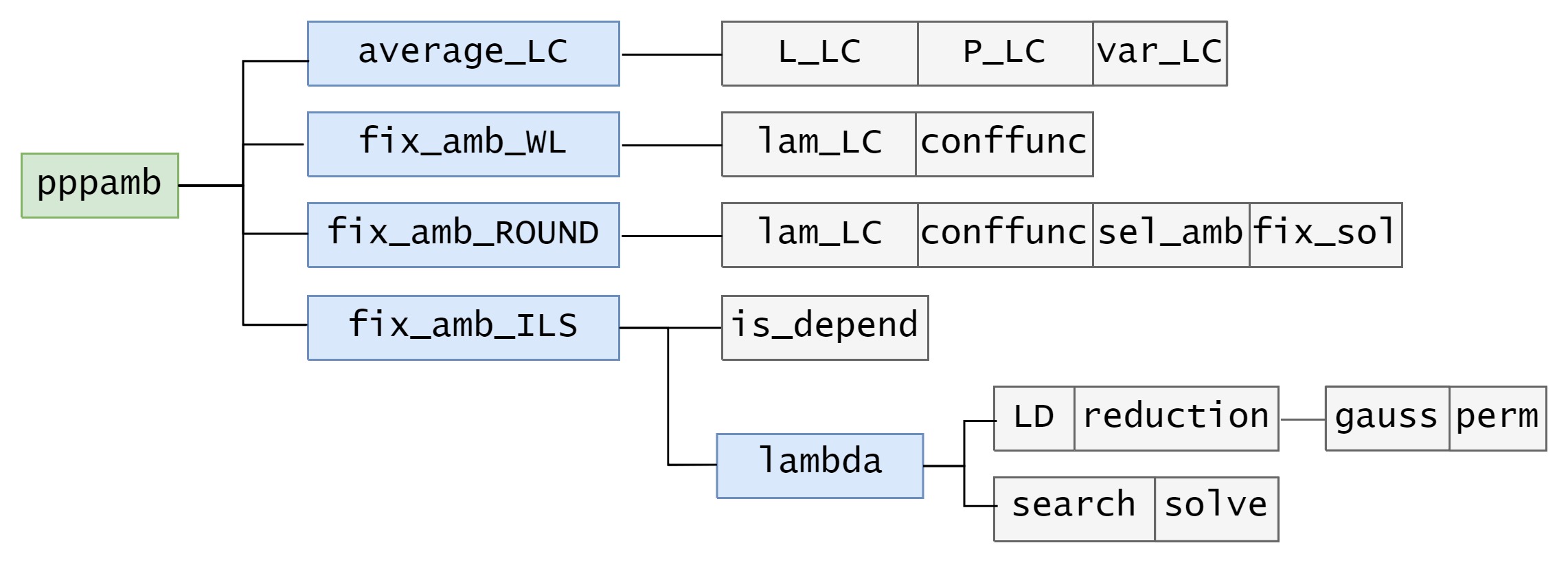
图12-2 pppamb() 函数调用流程图[1]
双频的宽巷就是两频率求和,窄巷就是两频率做差。宽巷组合具有较长的波长和非常小的载波方差,有利于模糊度的求解,但是放大了测量噪声;窄巷组合具有较小的距离方差,有利于基线矢量的精度,但是波长短,载波方差较大,不利于模糊度的求解。所以先固定较容易的宽巷模糊度,再固定窄向模糊度以获得更高的精度。
目前存在相较于 RTKLIB 更好的 PPP 算法开源项目,因此笔者将不再关注 RTKLIB 的 PPP 算法部分。