
2. 实时定位程序
RTKLIB 提供了 GUI 界面程序 RTKNAVI、和 CUI 命令行程序 RTKRCV 以进行实时定位解算。建议在看源码前,先实际动手操作 RTKNAVI,初步理解其中的概念。
2.1 RTKNAVI 使用示例
该部分主要参考自资料[25]。
2.1.1 软件和数据下载
RTKLIB 版本为 demo5 b34K,另外这里提供一段录制好的 RTCM 数据。
通常 RTKNAV 接入的是实时数据流,例如流动站会通过串口连接 GNSS 芯片,而基站通过 TCP 网络连接千寻的 CORS 服务。不过 RTKNAVI 也支持将这些数据录制下来,需要注意的时候,实时数据的录制与回放需要将相应的时间戳记录下来:
- 录制对应 RTKNAVI -> [L] -> Time-Tag 复选框;
- 回放对应 RTKNAVI -> [I] -> Time 复选框,同时将设置回放速度(如x1)。
2.1.2 打开 RTKNAVI
图2.1-1 RTKNAVI 主界面
2.1.3 加载配置文件(.conf)
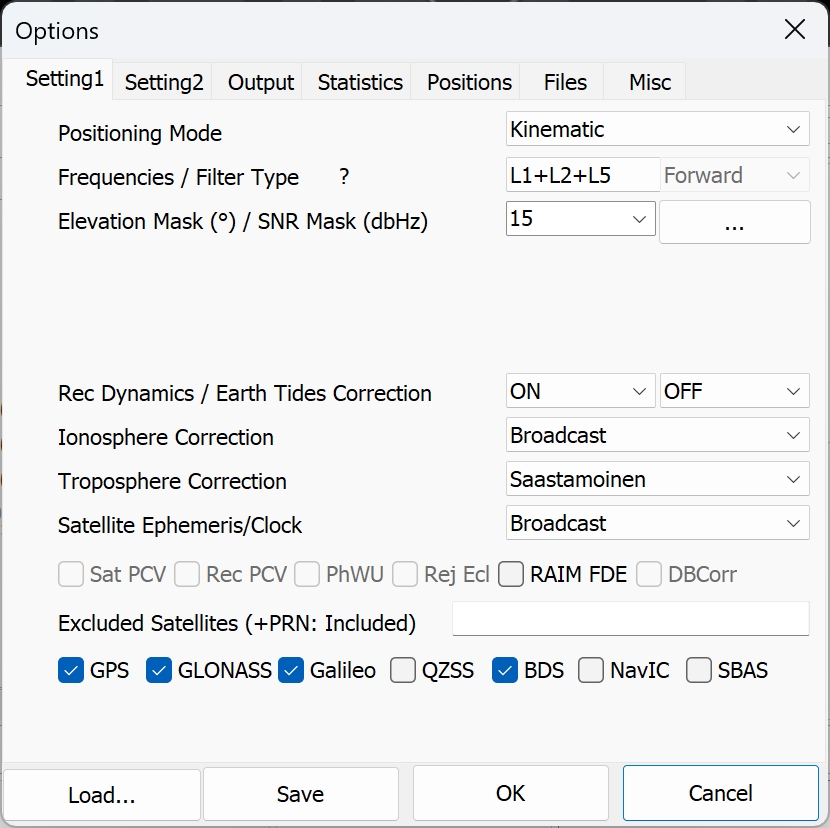
图2.1-2 RTKNAVI 配置选项
通过 [Options] 按钮进入配置选项页面,随后点击其中的 [Load] 按钮,加载配置文件(/sample_data/rtcm/example.conf)。
2.1.4 选择输入文件
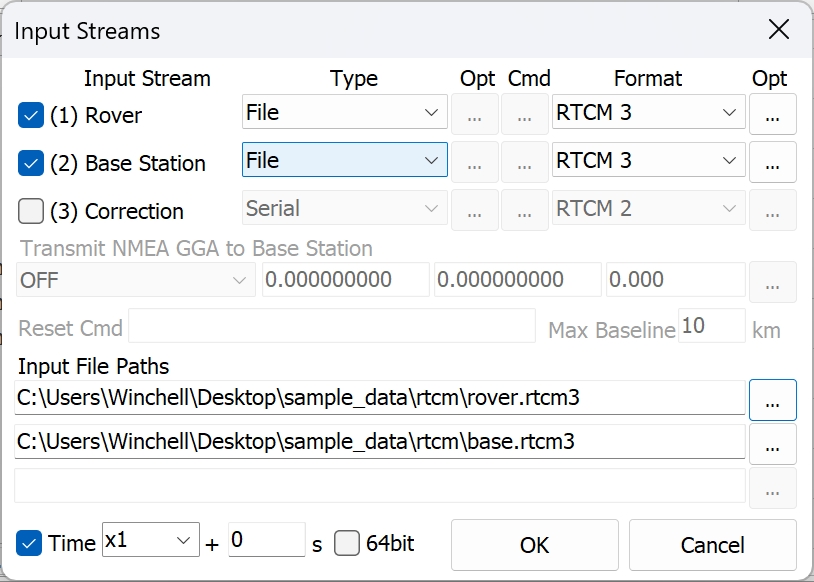
图2.1-3 RTKNAVI 输入文件
点击 RTKNAVI 主页面中的按钮 [I],随后在输入文件页面中选择输入文件。
输入流动站和基准站的文件路径。点击“输入文件路径”字段右侧的 [...],在第一列选择 /sample_data/rtcm/rover.rtcm3。同样在第二列选择 /sample_data/rtcm/base.rtcm3。这段数据是一段绕园区的 1Hz 步行数据,流动站为移远双频模块 LG69T,基站为千寻 CORS。勾选“Time”,并通过右侧下拉菜单选择 x1 来设置回放速度,然后在对话框中点击 [OK]。
2.1.5 使用 RTKPLOT 查看结果
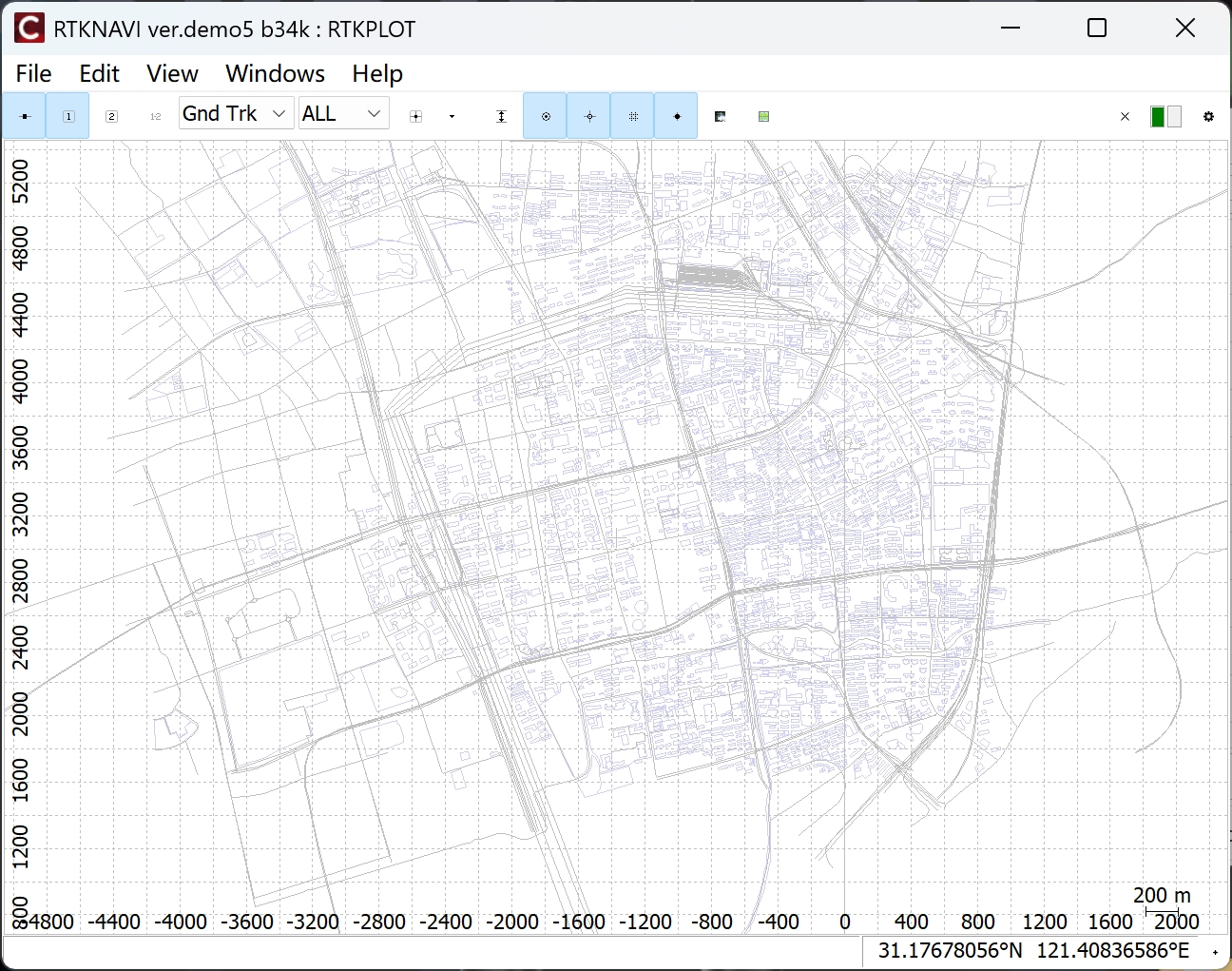
图2.1-4 RTKPLOT 窗口
点击 RTKNAVI 上的 [Plot...] 打开 RTKPLOT 窗口,随后在 [File] 中的 [Open Shapefile...] 中选择一段 GIS Shape 文件 (/sample_data/converted.shp/*),注意这里是导入全部文件。
2.1.6 运行 RTKNAVI
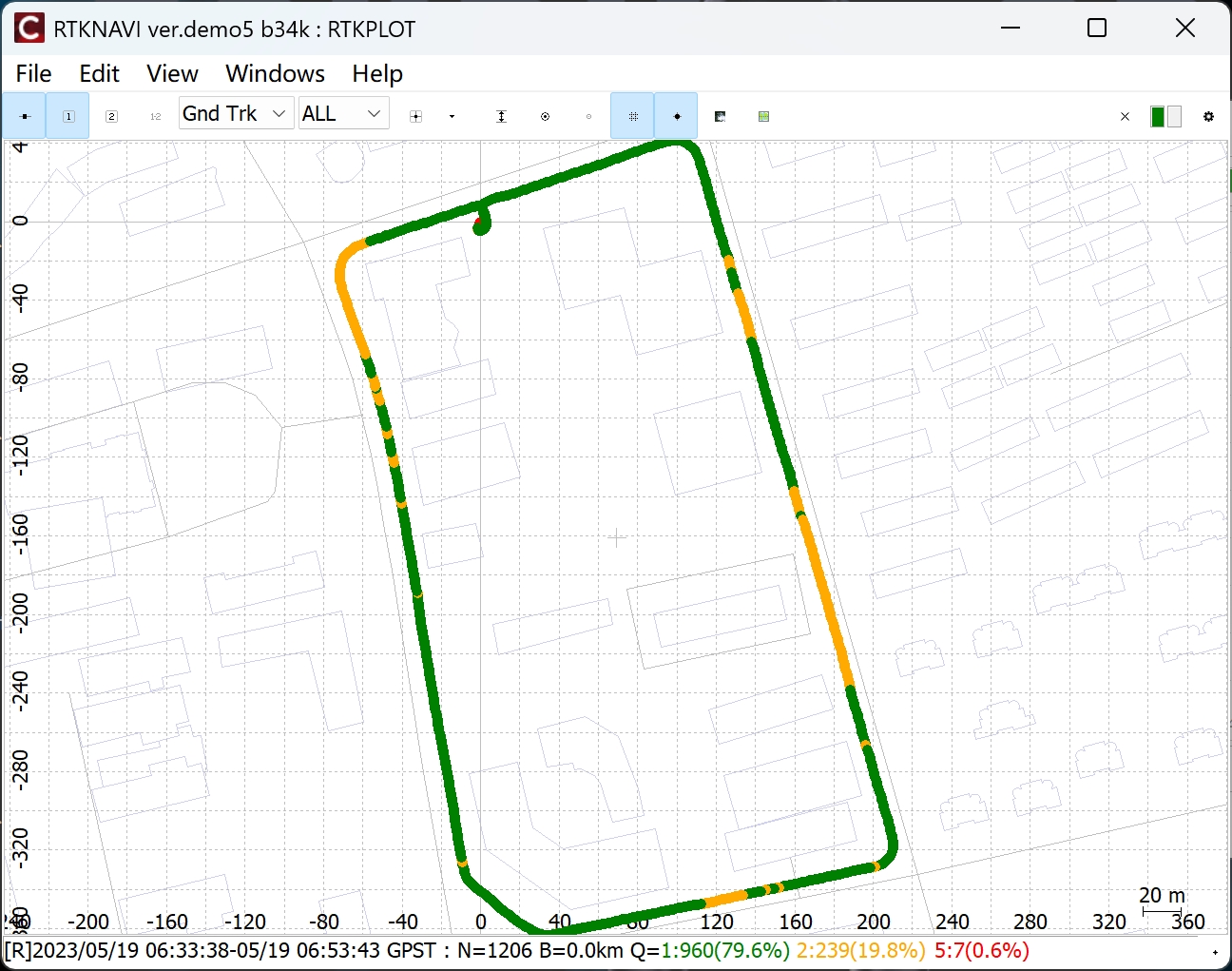
图2.1-5 RTKNAVI 运行结果
点击 RTKNAVI 上的 [Start] 按钮。RTKNAVI 开始回放已记录的数据。启动几秒后,您就能得到 RTK 解。解的状态为 FIX 表示已获得模糊度固定的 RTK 解,其精度通常为厘米级。
2.1.7 结果对比
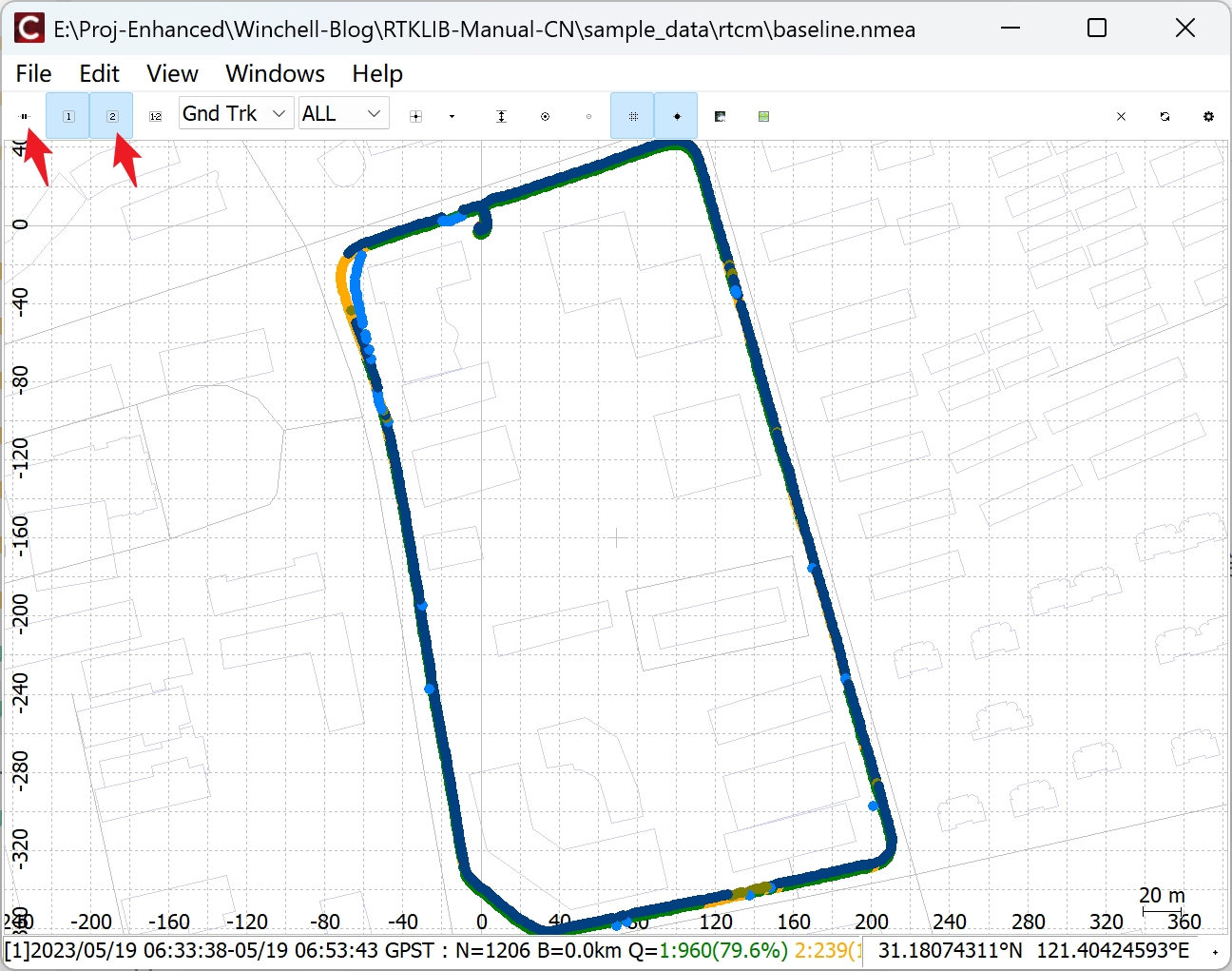
图2.1-6 结果对比
使用 RTKPLOT 左上角的 [连接与断开] 按钮,断开 RTKPLOT 与 RTKNAVI 的连接,随后双击按钮 [2] 并选择参考文件 /sample_data/rtcm/baseline.nmea,该文件是同时录制的和芯星通 UM960 的数据。从结果可以看到即使是优化过的 RTKLIB demo5 性能也与商业模块 UM960 存在有一些差距。
这主要是因为 RTKLIB 中的抗差和模糊度固定策略还存在改进空间。
2.2 数据传递过程
2.2.1 概述
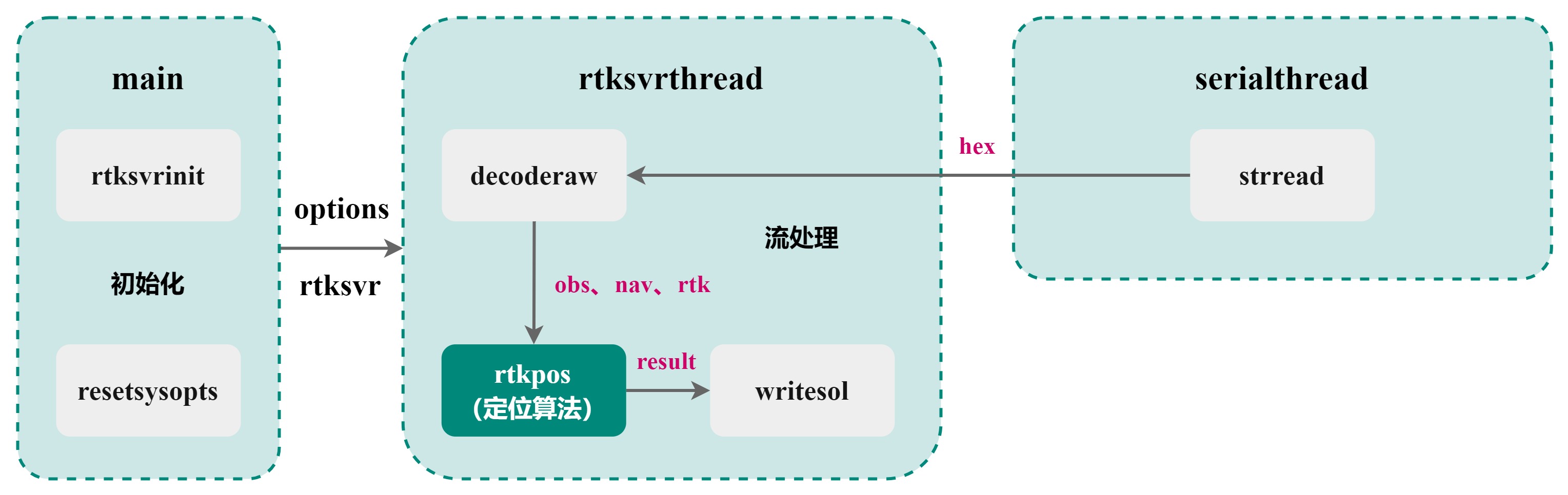
图2.2-1 RTKNAVI 代码流程
RTKNAVI 对应的 CUI 程序是 RTKRCV,其主程序为 /RTKLIB-b34L/app/consapp/rtkrcv/rtkrcv.c。
经过梳理发现 rtkrcv.c 的主函数主要流程如下:
- 使用
rtkrcvinit()函数初始化svr_t结构体(svr_t是一个基本揽括所有的庞大结构体); - 通过
resetsysopt()函数重置系统参数,如果有配置文件,会读取配置文件。否则会使用内部默认参数(rtkcmn.c/prcopt_default); - 通常包含两个线程用以进行实时处理(以串口获取数据为例):
serialthread():通过获取获取 16 进制的 RTCM 数据;rtksvrthread():解析来自串口的数据,将其转换为obs_t,nav_t,rtk_t等结构体。
- 核心算法运算
rtkpos(); - 输出结果
writesol()。
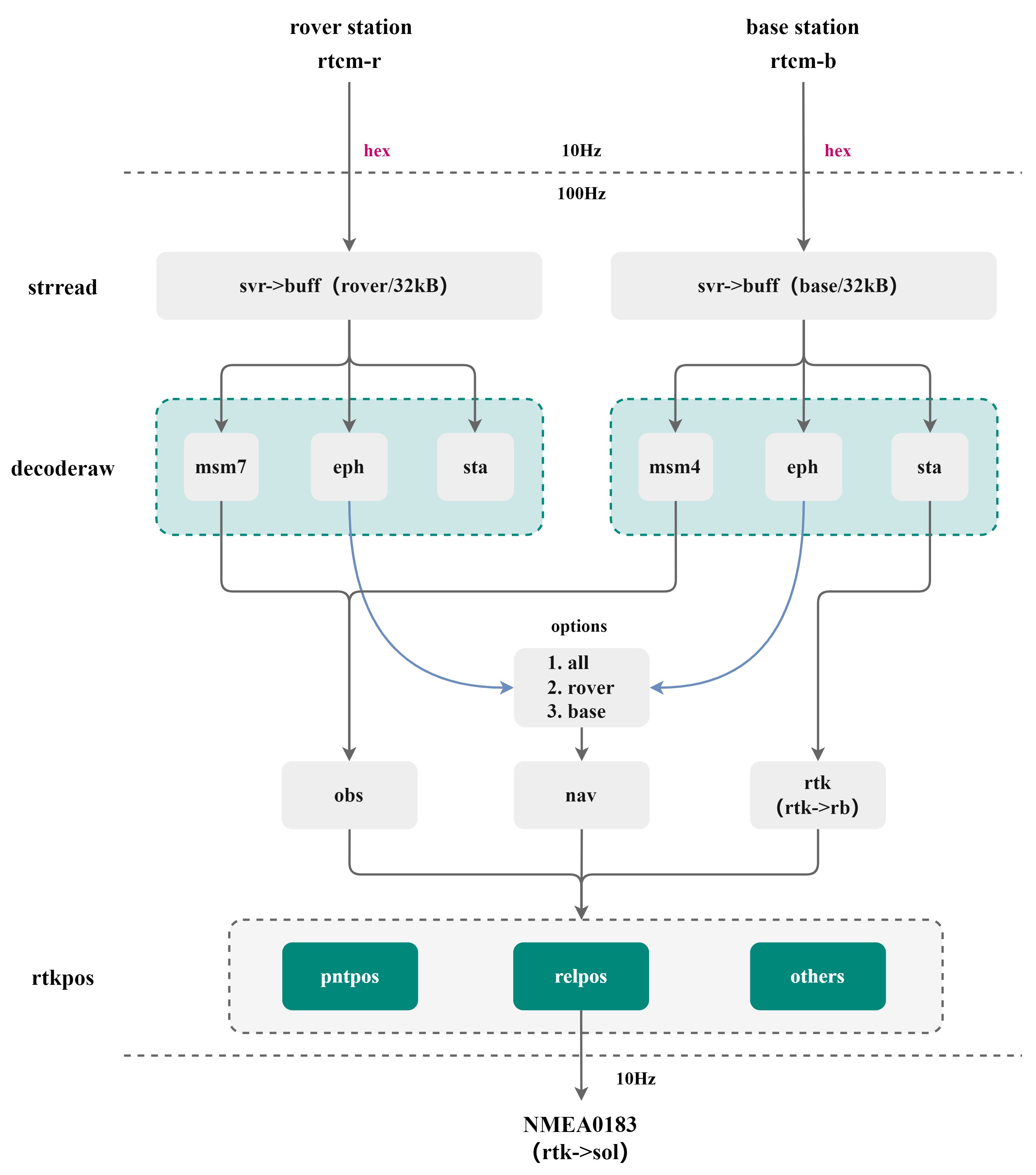
图2.2-2 RTKNAVI 数据流程
上图则显示了 RTKNAVI 从 RTCM 的数据、解析再到算法运算的数据流通流程。通常流动站会使用 MSM7 的数据类型,而基站端则使用 MSM4 的数据类型(数据更精简,便于传输)。基站数据中通常不包含星历数据,不过如果需要的话,也可以通过 MSM7 来获取,并在 RTKNAVI 中打开相应的设置(misc-navmsgsel)。
2.2.2 RTCM 的读取
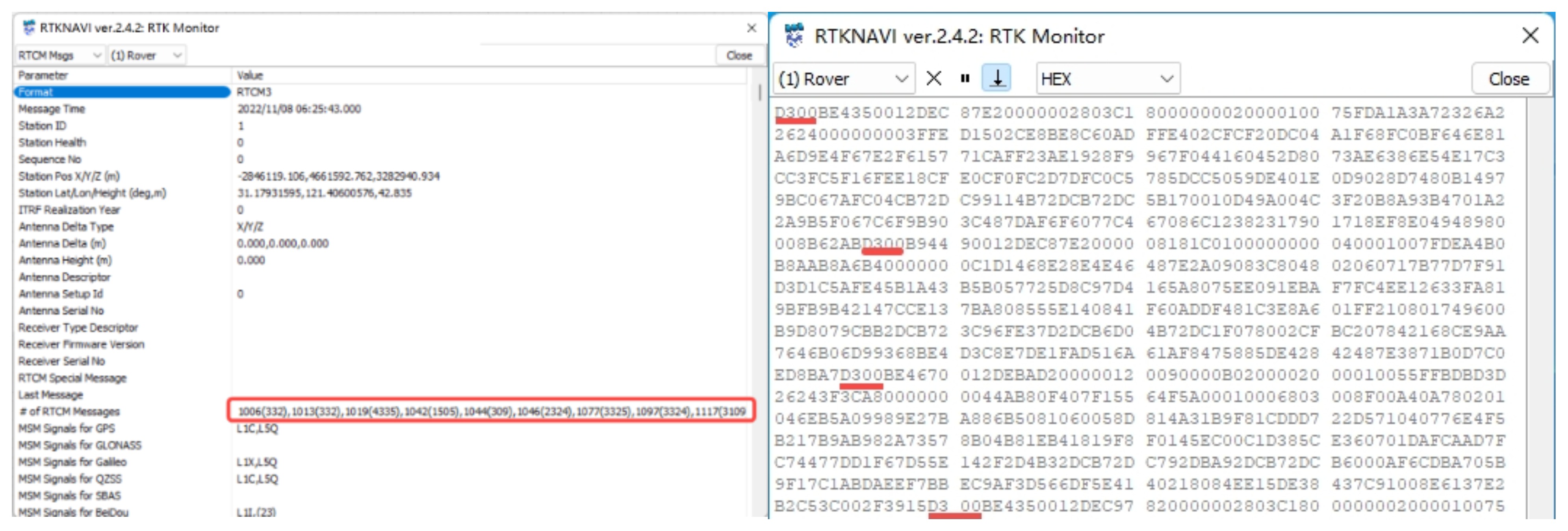
图2.2-3 RTCM 数据流
通过观测正在运行的的 RTKNAVI 程序的监视窗口(monitor),可以发现 RTCM 数据基本是以 D3 开头的 16进制数据。
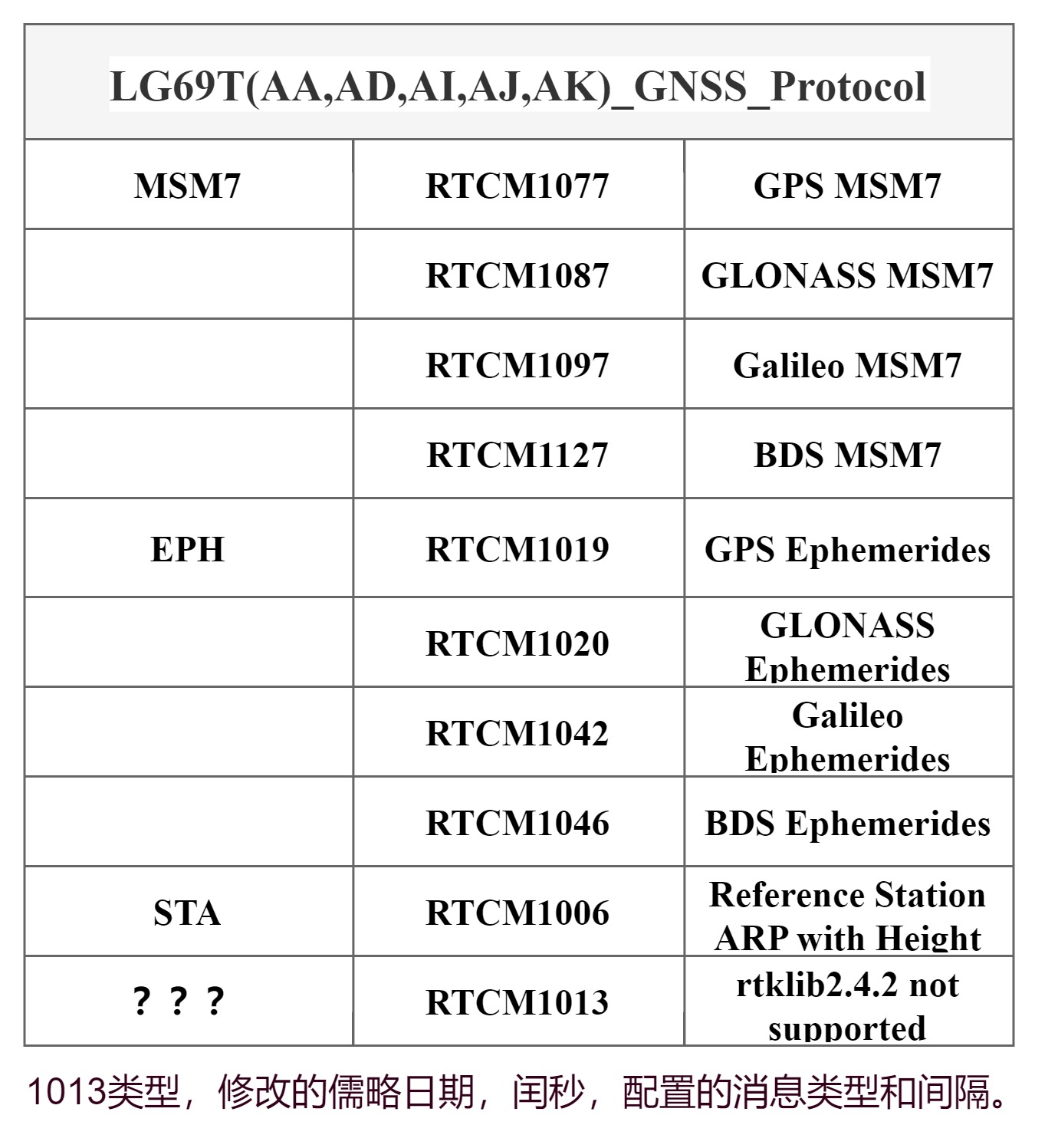
图2.2-4 RTCM 数据类别
具体的 RTCM 报文类别如上所示。
2.2.2 RTCM 的解析
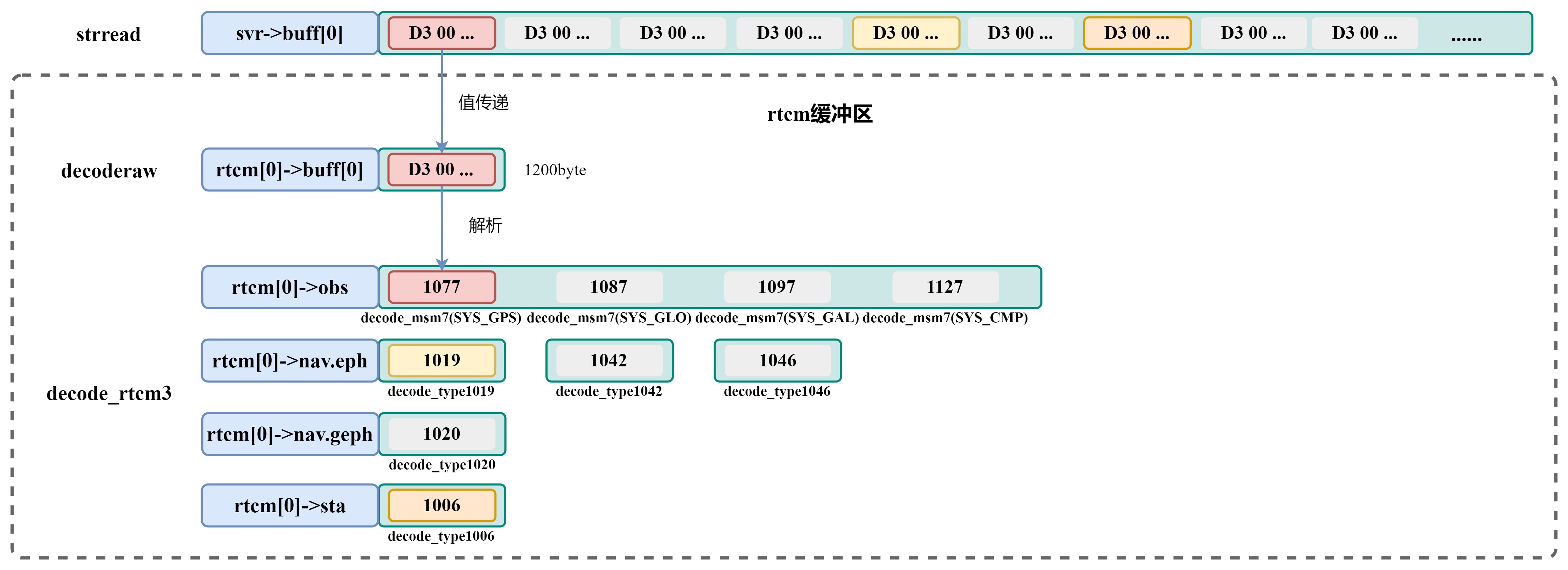
图2.2-5 RTCM 数据解析
- 通过
strread()函数读取 16 进制的 RTCM 数据,数据存储在svr->buff中; - 在经过
decoderaw()进行解析时:- 逐字节读取报文的过程中,每当检测到一个完整的 RTCM 报文就会进行一次报文的拷贝(将 s
vr->buff[]中单个的 RTCM 报文拷贝到svr.rtcm->buff中; - 会根据报文的类型,完成相应的解析工作(如
decode_msm7(),decode_1019()等),会根据报文的类型分别存储到rtcm->obs或rtcm->nav结构体中,例如:- 观测数据:解析 MSM7 数据,会将其存储到
rtcm->obs中; - 星历数据:解析 1019 数据,会将其存储到
rtcm->nav中; - 定位数据:解析 1006 数据,会将其存储到
rtcm->sta中(1006 报文是芯片提供的一个单点定位结果)。
- 观测数据:解析 MSM7 数据,会将其存储到
- 随后利用
updatesvr()将解析好的rtcm->obs或rtcm->nav数据合入svr->obs或svr->nav结构体中,需要注意的是在解析观测数据(如 MSM7 数据)时,需要检测多个星座是否为同一历元,如果是同一历元,则将其存储在一起(由 RTCM 报文中的同步标识作为判断依据)。
- 逐字节读取报文的过程中,每当检测到一个完整的 RTCM 报文就会进行一次报文的拷贝(将 s
2.2.3 定位解算
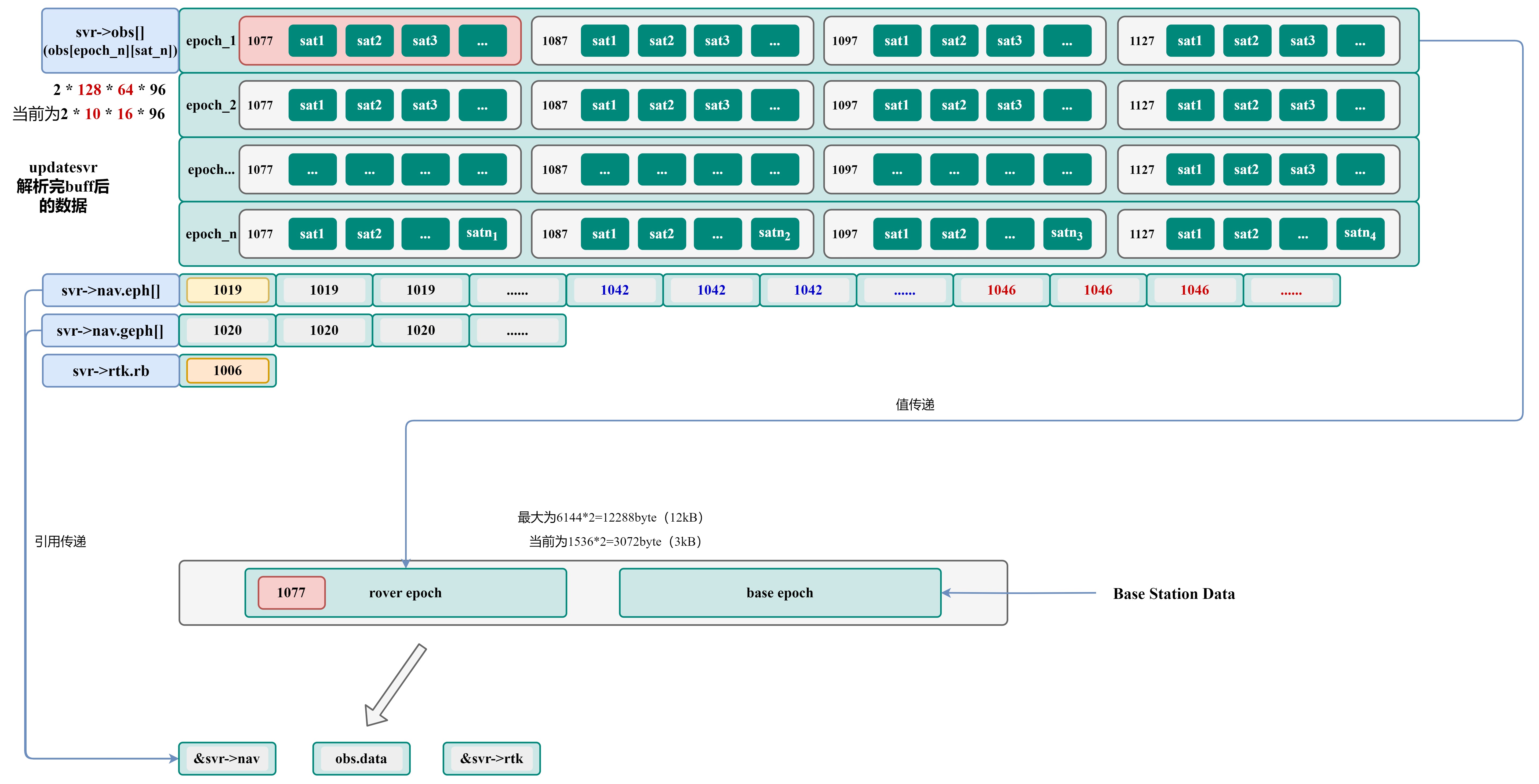
图2.2-6 定位前数据准备
定位之前的星历数据和基站位置数据是通过引用传递进去的,不过观测数据则会进行一次拷贝,具体的是定义一个新的 obs_t 数组,而后将流动站和基站的观测数据顺序存入该数组中。
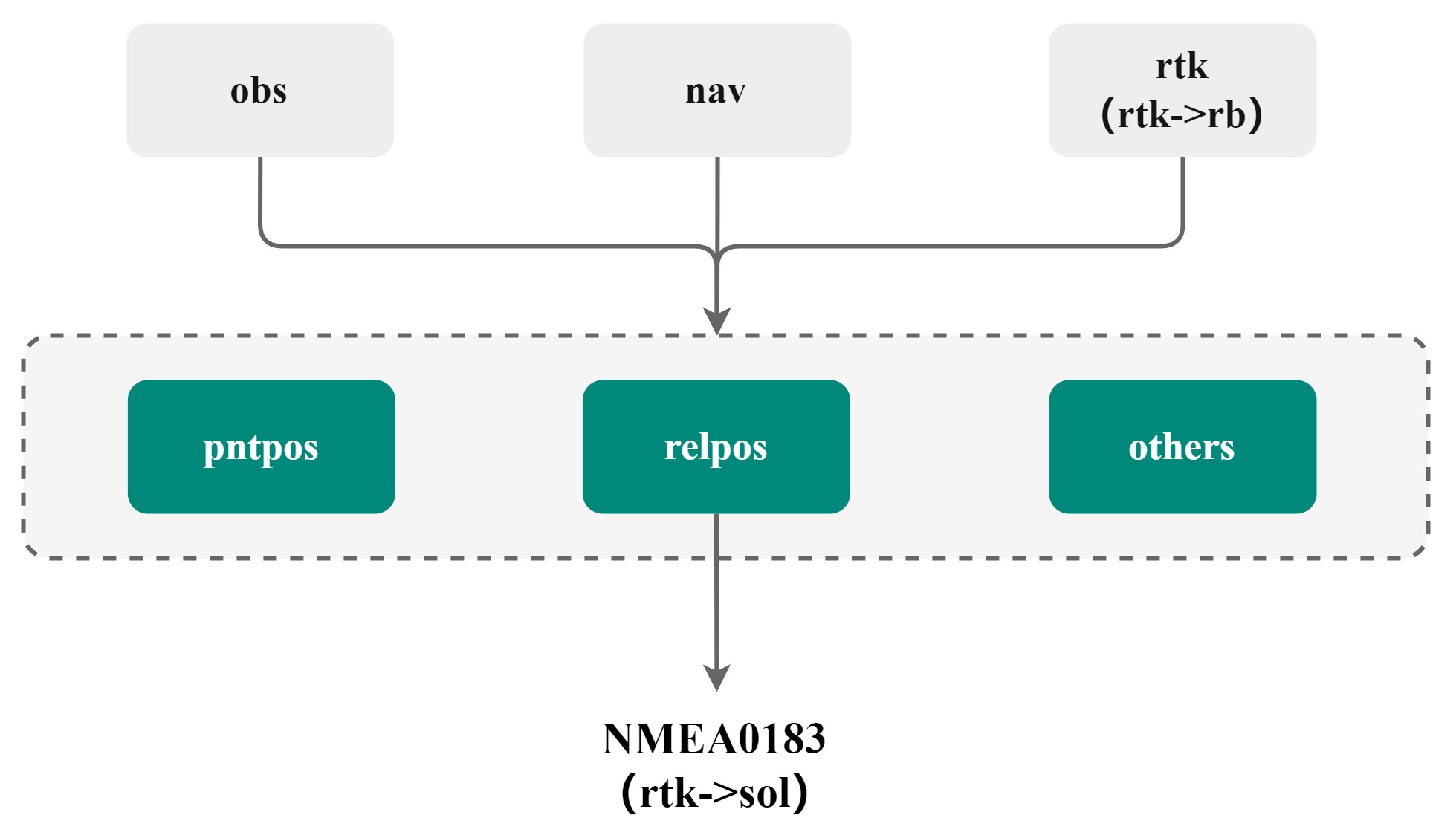
图2.2-7 定位解算
最后就是进入定位算法的解算了,更多细节可以参考后续伪距定位、相对定位和精密单点定位的章节。
对于定位算法以外的部分业务函数,它并非笔者所关注的重点,因此将不会对其进行更多的分析,也不会解析其源码。