
附录B: 常见问题
B.1 RTKLIB观测数据中的时间
/* pntpos (pntpos.c) */
sol->time=obs[0].time;
...
/* satellite positions, velocities and clocks */
satposs(sol->time,obs,n,nav,opt_.sateph,rs,dts,var,svh);问题:
源码中将 obs[0].time 作为星历选择时间传递给 satposs 函数,这样对于每一颗观测卫星,都要使用第一颗观测卫星的数据接收时间作为选择星历的时间标准。是否应该每颗卫星都使用自己的观测时间?或者应该使用每颗卫星自己的信号发射时间?还是说这点差别对选择合适的星历其实没有关系?
解答:
在 RTKLIB 的单点定位中,使用 obs[0].time 作为所有卫星的星历选择时间是合理的,主要原因如下:
- 时间差异微小:接收时间差异(几十毫秒)相对于星历时间分辨率(2 小时)可以忽略,对星历选择和位置计算影响甚微。
- 简化实现:统一时间参考减少了代码的复杂性,适合单点定位的低精度需求。
另外,RTKLIB 在取每一个历元的数据时,会对时间进行了判断,每个历元内观测量的时间相较于整秒间隔小于DTTOL(0.025s)。。
B.2 raim_fde 对卫星数目的要求
/* pntpos (pntpos.c)*/
/* RAIM FDE */
if (!stat&&n>=6&&opt->posopt[4]) {
stat=raim_fde(obs,n,rs,dts,var,svh,nav,&opt_,ssat,sol,azel_,vsat,resp,msg);
}问题:
这里规定能够执行 raim_fde 函数的前提是数目大于等于 6,感觉不是只要大于等于 5 就可以了吗?
解答:
RTKLIB 中的 raim 采用的是伪距残差检测法,伪距残差检测法要求至少有 6 颗可见卫星。
具体而言,必须要有2个冗余方程,所以卫星数需要大于等于6。如果只有5颗卫星,raim_fde 算法会排除一颗卫星进行位置计算,就只剩下4颗星。4个方程解4个未知数,是没有残差的,因为此时解算得到的是一个闭式解,残差为0。
B.3 satexclude() 的作用机制
问题:
对于步骤3中检测,先验证状态排除标志,后验证导航系统,这样就可能出现排除标志符合要求而所属系统不符合要求的状况,而步骤3中做法会将上述状况设为 included。又或者,在步骤3中检测之后仍验证了 svh>0,那如果出现 svh 不合乎要求而排除标志符合要求的状况,步骤3中做法却会将上述状况设为 included。
解答:
设置定位排除的卫星时候,有两种模式,一种是强制剔除某颗卫星,另一种是强制加上某颗卫星。
对于后者,此时需要在卫星ID前加上“+”,表示即使卫星状态不佳,该卫星也会被包括在定位中。该功能主要是为了分析问题卫星所在定位过程中所产生的影响。
B.4 无电离层组合
问题:
无电离层组合的误差方差为什么要乘以 3.0^2?
解答:
在 GNSS(如 GPS)中,无电离层线性组合(IFLC)通过线性组合 L1()和 L2()频率的观测值(如伪距或载波相位)来消除电离层延迟一阶项[4]。电离层延迟与频率平方成反比,因此组合公式为:
其中,系数 ,。计算频率比:
代入:
组合后,噪声方差通过误差传播计算,放大因子为:
为简化计算,实际应用中近似为 3.0,方差放大 $ 3.0^2 = 9.0 $,故使用 varr *= SQR(3.0)。
综上所述:
GNSS 无电离层组合(IFLC)使用 GPS L1 和 L2 频率(1575.42 MHz 和 1227.60 MHz)的平方比,得到组合系数 2.546 和 1.546。噪声方差放大因子为 。为简化计算,实际使用 varr *= SQR(3.0),表示方差放大 9 倍。
B.5 差分数据中 GLO 卫星无法投入计算
问题:
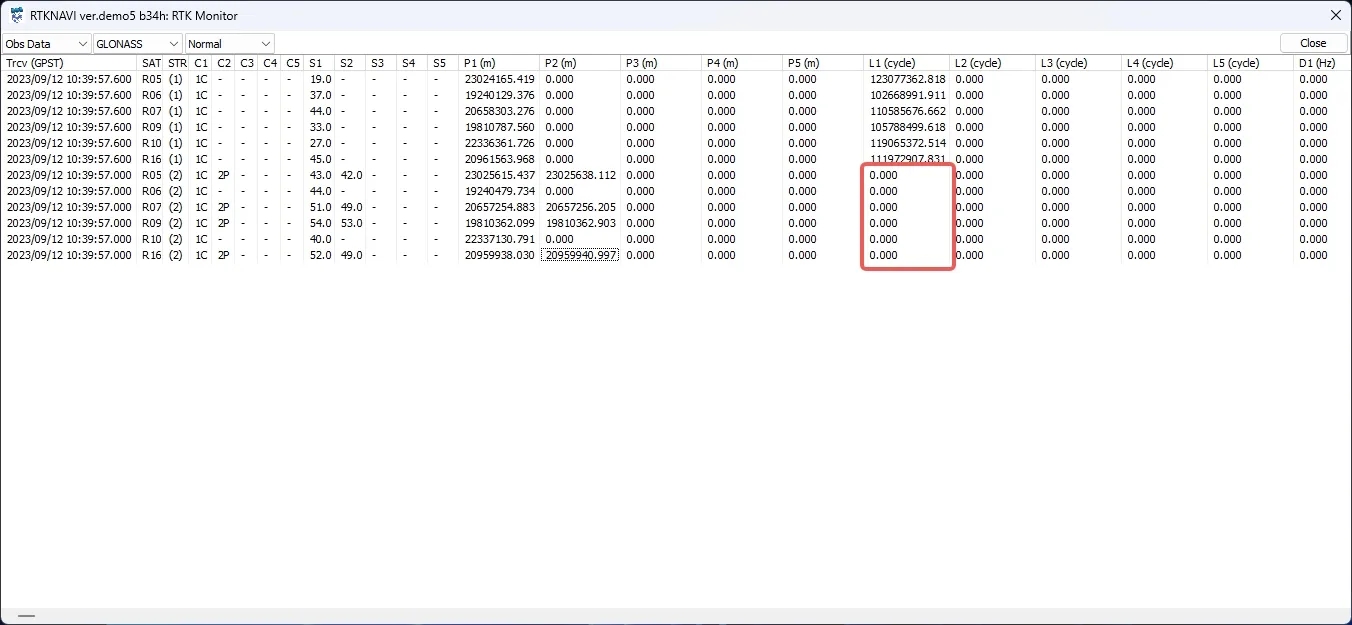
图B.5-1 GLO 卫星无法投入计算的现象
Debug:
/* save_msm_obs (rtcm3.c): save obs data in MSM message */
1. freq 为 0,导致 L 数据为0
2. freq=fcn<-7?0.0:code2freq(sys,code[k],fcn);
fcn 标识为 -8,导致 freq 为 0
3. rtcm->nav.geph[prn-1].sat 为 0,导致 fcn 无法被正常赋值
if ...
else if (rtcm->nav.geph[prn-1].sat==sat) {
fcn=rtcm->nav.geph[prn-1].frq;
}
4. GLO 卫星会根据观测数据中的 PRN 号到星历数据中找到对应的频段号才能计算出最终的载波相位值。解决:
/* 实时程序 */
// 在 decoderaw 中解析 rtcm3 的部分,将 rover 的 nav 结构体拷贝给 base 的 nav 结构体
if(index==0) {
memcpy(&svr->rtcm[1].nav, nav, sizeof(nav_t));
}
/* 后处理程序 */
如果是后处理的话,RTCM 1020 报文需要单独合入 RINEX 中。总结:
除了星历中包含 GLONASS FCN的信息,RTCM MSM5 和 MSM7 也包含该内容。不过通常差分数据的格式是 MSM4。
由资料[18]可知,RTKLIB 还无法从任何 MSM 消息中提取频率信息,并且如果没有 GLONASS 星历表消息,则无法为任何 MSM 消息(1-7)包含 GLONASS 相位观测值。不过 demo5 代码中添加了一项功能,解决了 MSM5 和 MSM7 消息的这个问题,但其他消息仍然无法在 RINEX 文件中生成相位观测值。
B.6 雅可比矩阵、几何矩阵和设计矩阵
问题:
雅可比矩阵、几何矩阵和设计矩阵是一回事吗?
解答:
是的。在 GNSS 定位中,雅可比矩阵 = 几何矩阵 = 设计矩阵,都是指将非线性观测方程线性化后,状态量(如接收机位置、钟差)对观测值(如伪距)的偏导数构成的矩阵,记作 H 或 G
| 名称 | 语境/侧重点 | 说明 |
|---|---|---|
| 雅可比矩阵 | 数学/优化 | 强调它是非线性函数的一阶偏导矩阵,用于线性化观测模型。 |
| 几何矩阵 | GNSS 导航/几何因子分析 | 强调它包含了卫星与接收机之间的几何关系(如方向余弦),直接影响 GDOP。 |
| 设计矩阵 | 最小二乘/参数估计 | 强调它是观测方程对未知参数的线性系数矩阵,用于构建法方程。 |
笔者将尽量使用雅可比矩阵的描述,因为它使用更为广泛。