
4. EKF
EKF单点定位的核心是将伪距、载波相位或多普勒观测值作为输入,通过非线性状态空间模型描述接收机运动状态和观测关系,利用EKF对状态进行最优估计。EKF通过线性化非线性观测方程,结合系统噪声和观测噪声的统计特性,递归更新状态估计和协方差矩阵。
4.1 基于EKF的观测域滤波
4.1.1 时间更新
状态以及其相应方差协方差的预测在以下函数中实现:
/* temporal update of position/velocity/acceleration */
static void UdposSPP(rtk_t *rtk, sol_t *sol_lsq, double tt)这里实现的是PVA模型,也即位置/速度/加速度模型。函数的输入tt是相邻两次状态转移的时间间隔,主要是过程噪声的计算需要依赖tt。直观上也很容易理解,外推时间越长,过程噪声设置应该越大。
1. F阵的构建
for ( i = 0 ; i < 6 ; i++ ) {
F [ i + ( i + 3 ) * nx ] = tt;
}速度相关项的设置如上若是。这个循环设置了速度到位置的状态转移关系,将F矩阵中位置与速度相关的元素设置为时间间隔tt。
for ( i = 0 ; i < 3 ; i++ ) {
F [ i + ( i + 6 ) * nx ] = SQR ( tt ) / 2.0 ;
}加速度相关项的设置如上所示。这个循环设置了加速度到位置的状态转移关系,使用时间间隔tt的平方除以2来计算加速度对位置的影响。
2. Q阵的构建
/* process noise added to only acceleration */
Q[0] = Q[4] = SQR(rtk->opt.prn[3]) * fabs(tt);
Q[8] = SQR(rtk->opt.prn[4]) * fabs(tt);
ecef2pos(rtk->x_spp, pos);
covecef(pos, Q, Qv);
for (i = 0; i < 3; i++) {
for (j = 0; j < 3; j++) {
rtk->P_spp[i + 6 + (j + 6) * NX_F] += Qv[i + j * 3];
}
}RTKLIB中的Q只对加速度噪声进行了定义。在时间更新时,P和Q可以看作一个整体,而加速度的噪声,总会通过PVA运动模型通过状态转移传递到位置与速度项中。
3. 钟噪声的处理
/* add the receiver clk process noise */
for (i = 9; i < NX_F;i++) {
rtk->P_spp[i + i * NX_F] += SQR(10000);
}这里给钟增加了非常大的噪声,因此每次钟都会重新估计。
4.1.2 量测更新
1. 滤波中残差的描述
rescode和ResdopFilter分别构建了残差项v和设计矩阵H,而滤波的验前残差其实就是新息,为了记住其数学顺序,我们可以管这个过程叫OMC(Observation Minus Computation)。另外需要注意的是RTKLIB中的设计矩阵H实际是真实设计矩阵的转置。
Kalman滤波的残差计算和最小二乘的类似,最小二乘中计算的是基于概略位置的修正值,Kalman滤波也一样,也是相对于预测状态的更新量。区别在于Kalman滤波算法的状态量增加了速度和加速度。
2. rescode(伪距H和v的构建)
设计矩阵和残差阵依然采用最小二乘的rescode函数,只是将其中接收机所在位置进行了更新。
此前最小二乘的状态x只有位置和钟,但是现在增加了速度和加速度,因此增加了6个维度。
InsertVelAcc(nv, H);为了方便,这里的rescode和原本基本保持了一致,内部暂时没有考虑速度和加速度。不过在rescode执行结束以后,在外层修改了H,从而增加速度和加速度项。另外v和var是向量,它们的维度仅与nv有关(有效观测的数目)。
3. ResdopFilter(多普勒H和v的构建)
/* range rate residuals */
static int ResdopFilter(const obsd_t *obs, const int n, const double *rs,
const double *dts, const nav_t *nav, const double *rr,
const prcopt_t *opt, const ssat_t *ssat, const double *x,
const double *azel, const int *vsat, double *v, double *var,
double *H)构建速度观测项时,我创建了ResdopFilter函数,其本质上和原先的resdop相差不多,只是在一些状态位上存在一些差异。
在加权方面,原本的resdop使用了sig,这里主要是对不同频段的信号进行了简单的加权。速度的加权我使用了varerr,这部分代码原本是对伪距设计的,不过如果将其中的缩放因子进行合理调节,也能用于多普勒,这里参考3.2节。此前的x[3]项是钟漂,并认为所有系统的钟漂都是一样的。
4. 滤波
新增的Kalman滤波算法逻辑与RTK算法中完全一样。复用了filter函数,filter函数中调用了filter_,调用之前做了进一步处理,即仅状态值非0且方差大于0的状态参与滤波。这样处理是因为在RTK中默认的状态量包含了所有卫星的模糊度,对于没有观测值更新的模糊度明显是不需要参与滤波的。
所以在使用该filter时,注意各状态量的初值不要设置为0。或者直接调用filter_函数。将滤波结果更新回rtk_t->x_spp和rtk_t->P_spp中,便于下一历元的处理。同时将滤波存储到sol_t中。
4.1.3 检验代码的合理性
增加算法功能最麻烦的是,不确定自己所写的代码是否正确,尤其是遇到结果似是而非的时候,此时需要诊断“当前的情况究竟是错误还是误差”。这里我的解决方法是找到一个正确的开始,并基于这个初始的代码新增功能,确保功能增加后性能有所提升。
在完成EKF的代码后,一种“找到正确的开始”的方法是将EKF设置不相信预测,并充分相信观测中的伪距,然后看它的结果是否和单纯的最小二乘的结果一致。
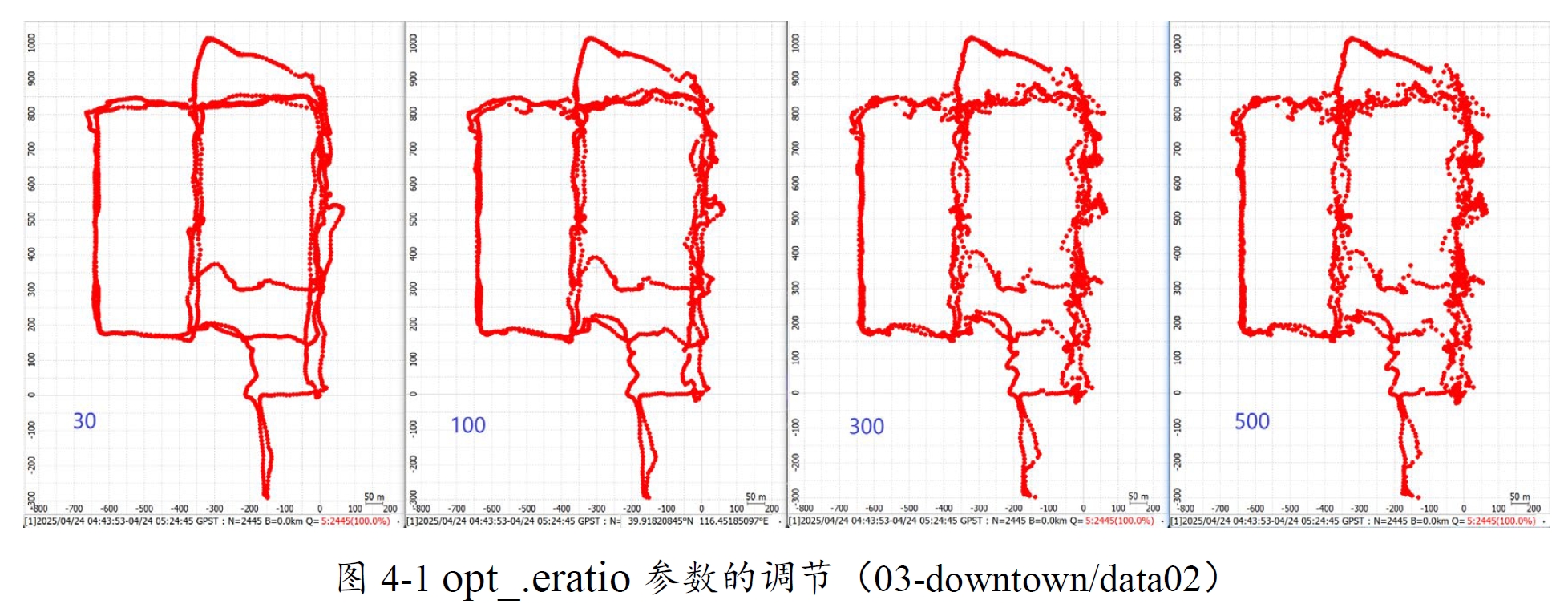
源码中使用rescode和ResdopFilter共同构建H和v阵,并最终用到量测更新中。在ResdopFilter中通过代码内部的opt_.eratio来控制最终伪距与多普勒之间的信赖关系(类似RTKLIB原本的stats-errdoppler),将其设置较大数值基本就和WLS的效果差不多了,通过这种方式可以检查自己的代码流程是否有问题,如图4-1所示。
EKF中的Q与R的比率决定了是信赖预测还是信赖观测,R内部针对伪距和多普勒的权重,决定了是信赖伪距还是信赖多普勒,而预测中主要使用的速度项由多普勒计算得到。
4.2 零速修正
if (fabs(enu[0]) < 0.5 && fabs(enu[1]) < 0.5 && norm(x_last,3) >= 1000) {
rtk->nzupt++;
rate = 1.0 / rtk->nzupt;
if (rate == 1.0) {
for (j = 0; j < 3; j++) {
x[j] = x_last[j];
x[j+3] = 1e-4; // [3:5]
}
} else {
for (j = 0; j < 3; j++) {
x[j] = x_last[j] * (1-rate) + x[j] * rate;
x[j+3] = 1e-4; // [3:5]
}
}
} else {
rtk->nzupt = 0;
}上述代码是ZUPT(Zero Velocity Update, 零速修正)逻辑的核心部分,通过坐标转换和条件判断实现零速检测,并在检测到静止状态时更新状态向量,融合历史和当前数据以提高定位精度。注意在检测零速前,需要将速度量从ECEF坐标系转到ENU坐标系下。
ZUPT:当检测到ENU坐标系下水平速度(东向和北向)偏移量较小(<0.5米)且位置远离原点时,则假设系统处于静止状态(零速度),通过ZUPT来校正状态向量,减小漂移误差。
平滑融合:通过rate因子,代码在多次ZUPT中逐步减小当前状态的权重,更多依赖历史状态(x_last),从而实现平滑的位置和速度更新。
4.3 自适应Q
stat = pntpos(obs, n, nav, &rtk->opt, &sol_lsq, azel, rtk->ssat, msg);
UdposSPP(rtk, &sol_lsq, dt);
if (stat > SOLQ_NONE) {
double y[6] = {0};
double yi[6*6] = {0};
for (i = 0; i < 6; i++) {
y[i] = sol->rr[i] - sol_lsq.rr[i];
}
matmul("NT", 6, 6, 1, y, y, yi);
for (i = 0; i < 3; i++) {
for (j = 0; j < 3; j++) {
// set velocity residual to P_spp
rtk->P_spp[(i+3) + (j+3) * NX_F] += yi[(i+3) + (j+3) * 6];
}
}
}我使用了EKF预测的速度与RWLS的速度差值来构建Q中的速度协方差项,这是一个我偶然发现的谈不上专业的方法,但是它是有效的,因此我保留了这部分代码。
一些利用残差进行自适应Q调节的方法可能会用到滑窗的技术[08],不过目前暂未对其进行尝试。
4.4 EKF中使用RWLS
4.4.1 EKF中的抗差
在使用最小二乘进行单点定位时,抗差和定位共用了同一个LSQ。但是EKF中,没有可共用的LSQ。这里需要以位置和速度项联立构建一个新的最小二乘表达式,并求得新的v与H,然后将其提供给EKF量测更新。
for (j = 0; j < nv; j++) {
for (k = 0; k < NX_F-3; k++) {
if (k >= 6) {
H_new[k + j * (NX_F-3)] = H[k+3 + j * NX_F];
} else {
H_new[k + j * (NX_F-3)] = H[k + j * NX_F];
}
}
}具体的,构建H和v矩阵需要去除加速度项,因为H阵的加速度项全为0,这样会导致H阵不可逆,导致最小二乘解算失败,其去除过程如上所示。至于剩下的部分则与第3章相同。
4.4.2 伪距残差的零均值问题
1. 伪距残差水平
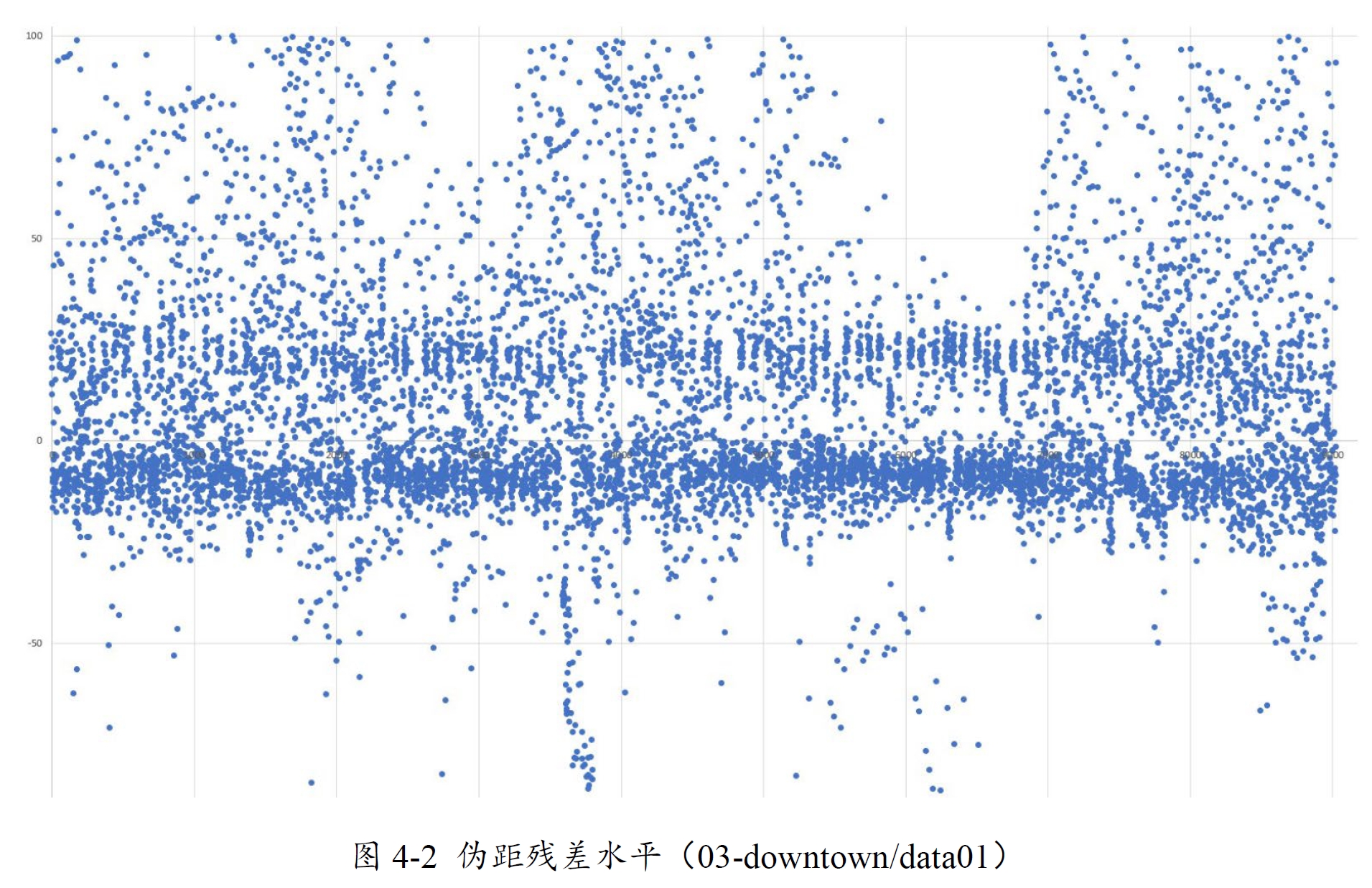
上图是手机伪距的验前残差(截取±100之间数值),发现:
- 正值的落点比较稀疏,负值的落点相对密集;
- 同时正值相对密集区域的均值(大概+20左右)比起负值密集区域的均值(-10左右)绝对值较大。
整体上伪距残差并没有符合零均值分布的特点,存在一定的正偏。
2. 残差与SNR
根据SNR加权模型可计算出一个伪距误差项,残差应该和SNR误差项是相关的,直接使用残差除以SNR标准差(正值)得到如下情况(类似标准化)。
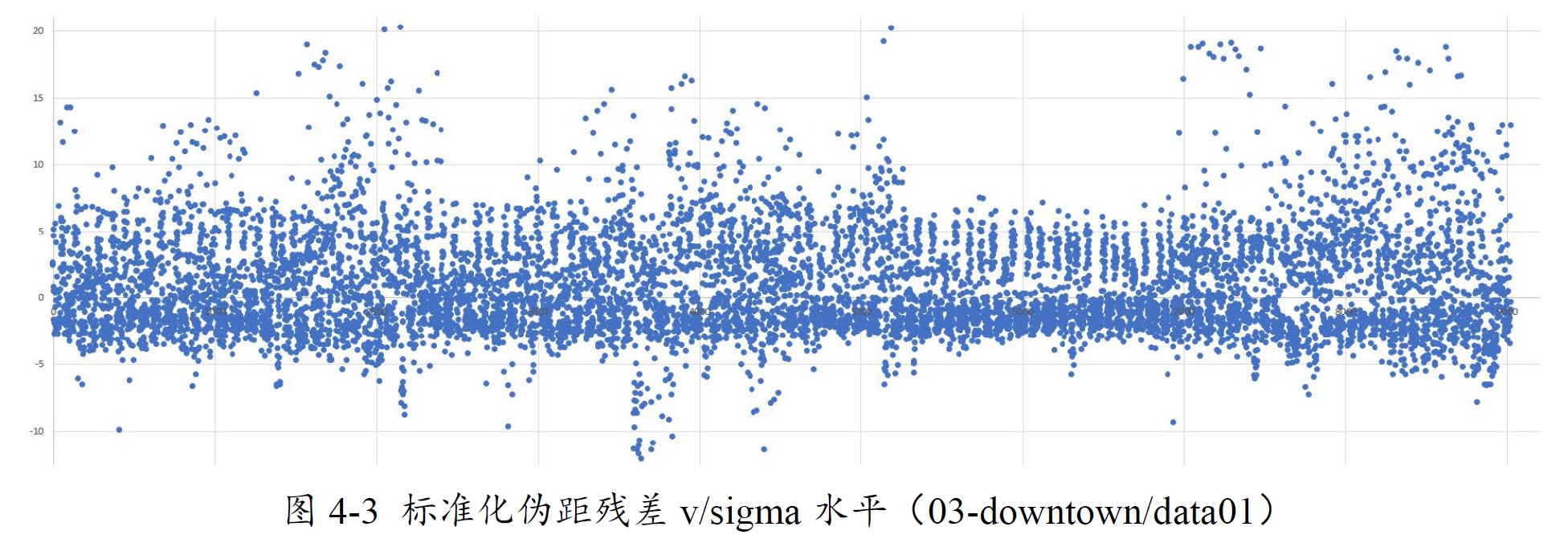
上述操作类似标准化,让残差的水平更加集中,从而方便观测,上图同样是不满足零均值的,如果将其进行零均值修复,发现对结果有极大的改善。这里的N来自上图的均值偏差(约2.5),sigma是SNR加权模型计算得到的标准差。
// RobustFilter外部
for (j = 0; j < nc; j++) {
v[j] -= 2.5 * sqrt(var[j]);
}
RobustFilter(H_new, v, NX_F-3, nc, nd, NULL, var);
…
// RobustFilter内部
for (i = 0; i < nc; i++) {
v_new[i] -= 1.0; // v_new已经归一化
}零均值修复既可以放在抗差前,也可以放在抗差的过程中,不过似乎放在抗差的过程中效果会更好一些。至于为什么这么做能够提升算法性能,猜测是因为残差符合零均值分布会让抗差更均匀,从而提高了最终性能。
4.4.3 抗差EKF性能
