
# 一、基本操作
# 1. 串口通信
关于串口通信,有波特率和比特率这两个重要概念,尤其是波特率,其表示每秒传输码元的数目,关于串口通信的重要概念如下所示:
| 概念 | 说明 |
|---|---|
| 波特率 | 表示每秒钟传输的二进制位数,单位为比特每秒(bit/s) |
| 比特率 | 表示每秒钟传送的码元符号的个数,是衡量数据传送速率的指标。 |
| 码元 | 是通讯信号调制的概念,通讯中常用时间间隔相同的符号来表示一个二进制数字,这样的信号称为码元。 |
| 起止位 | 额外一位或两位用于作为发送或接收的开始和完毕信号位。 |
| 数据位 | 如果使能了奇偶校验,那么实际数据将在该位数上减一。 |
| 校验位 | 可选择奇偶校验或不校验。 |
***波特率和比特率之间的关系:***常见的通讯传输中,用 0V 表示数字 0, 5V 表示数字 1,那么一个码元可以表示两种状态 0 和 1,所以一个码元等于一个二进制比特位,此时波特率的大小与比特率一致。如果在通讯传输中,有 0V、2V、 4V 以及 6V 分别表示二进制数 00、 01、 10、 11,那么每个码元可以表示四种状态,即两个二进制比特位,所以码元数是二进制比特位数的一半,这个时候的波特率为比特率的一半。由于很多常见的通讯(串口通信)中一个码元都是表示两种状态,所以大家常常直接以波特率来表示比特率 。
***参考博客:***串口通信知识概要 (opens new window),该博客提取了野火教程文档里面的一些内容。
# 2. 大小端
符合常规常规逻辑的是大端,即数据高位在内存地位;
符合运算逻辑的是小端,即数据高位在内存高位。
参考:https://zhuanlan.zhihu.com/p/144718837
# 3. PCB板
印刷电路板是组装电子零件用的基板,其主要功能是使各种电子零组件形成预定电路的连接,起中继传输的作用,是电子产品的关键电子互连件,PCB作为电子零件装载的基板和关键互连件,任何电子设备或产品均需配备。
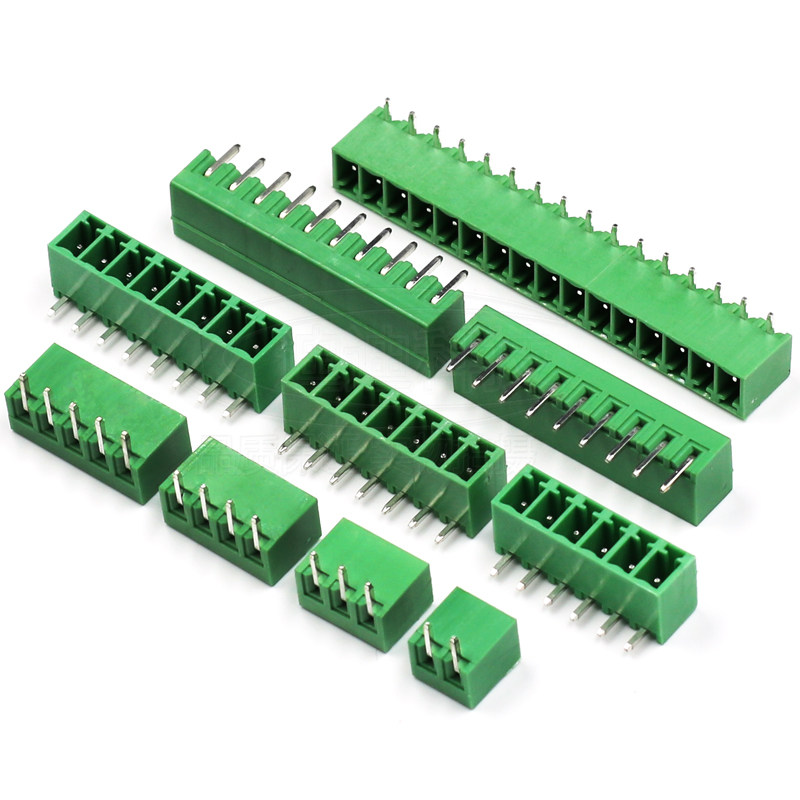
PCB板会附属***接线端子***,如下图所示:
另外实验项目经常会用到***杜邦线***,杜邦线可用于实验板的引脚扩展,增加实验项目等,其优点是使用方便,无需焊接。
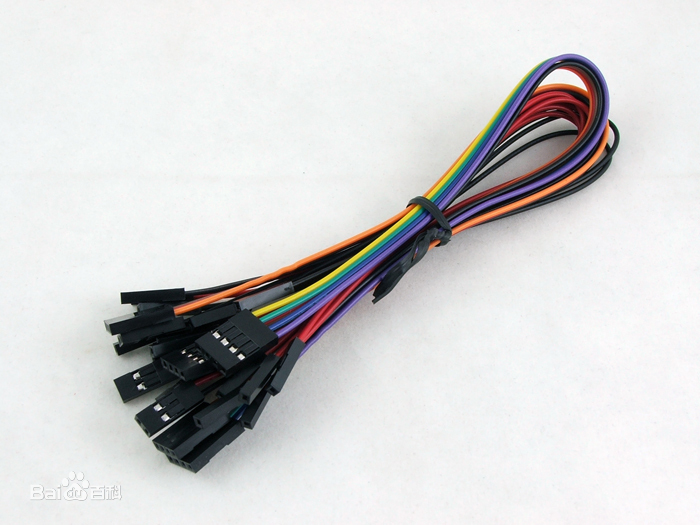
杜邦线有孔的一端叫做母线,有针头的一端叫做公线。
# 4. 机器人小车交互指令分类
从目前掌握的情况,机载电脑和小车STM32开发板之间的交互主要是***控制指令***、电机状态反馈***以及临时加上的GPS***位置信息,位置信息加载在STM32上是为了方便做机载电脑的算法调试。
| 指令类型 | 描述 |
|---|---|
| 控制指令 | 控制指令可参考见上一记录:0914。 |
| 电机状态反馈 | 目前使用的是恒驱的一款直流无刷电机,其占空比用来表征速度,霍尔传感器和减速电机用来表征圈数。后续会用上不同的电机,如直流有刷电机、舵机、步进电机、直流无刷电机以及一些编码器的使用,根据这些信息提取出一些并集,用来作为电机的状态反馈信息。 |
| 位置信息 | 为方便机载电脑做算法测试而临时加载STM32上的。 |
补充知识:
“左手定则”又叫电动机定则,用它来确定载流导体在磁场中的受力方向;
“右手定则”又叫发电机定则,用它来确定在磁场中运动的导体感应电动势(感应电流)的方向。
电机理论与应用参考野火电机应用开发资料 (opens new window)。
# 5. PWM和霍尔传感器
脉冲宽度调制(Pulse width modulation,PWM)信号,即PWM通过一定规则对脉冲的宽度进行调制,从而改变电压和输出频率的大小。PWM通过设定的频率来改变通电和断电时间, 从而控制电路输出功率,在电机的控制周期中,通电时间决定了电机转速。
占空比=通电时间/(通断时间+断电时间),表示高电平占整个周期的百分比,如下图所示:
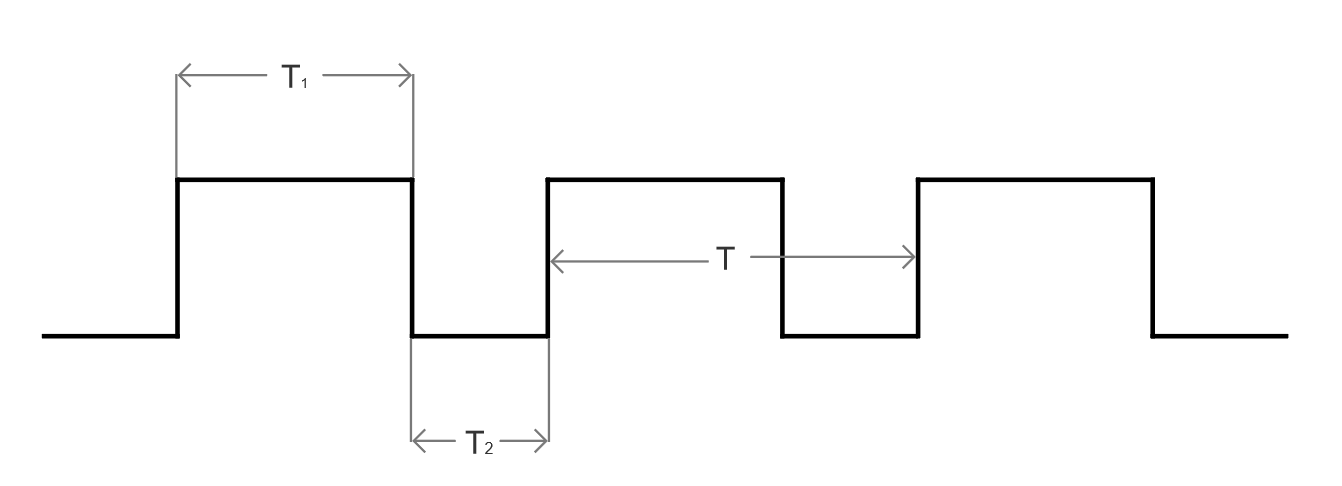
上图中:T1为高电平时间,T2为低电平时间,T是周期。
D(占空比) = T1/T*100%
设电机的速度为V,最大速度为Vmax。
则:V=Vmax*D
当占空比D(0≤D≤1)的大小改变时,速度V也会改变,所以只要改变占空比就能达到控制的目的。
***霍尔传感器***是一个换能器,将变化的磁场转化为输出电压的变化,可以通过霍尔传感器来记录轮子转动的圈数。
# 6. 更新WIN11后,不支持PL2303TA
参考:https://blog.csdn.net/qq_43322436/article/details/121122232